最近は太陽系外惑星が多数発見されていますが、惑星は恒星よりもずっと小さく暗いため、直接惑星の様子を観測することは一般には非常に難しいです。
そのため、間接的に系外惑星を発見する手法が多く用いられています。
系外惑星を発見するための方法にはいくつかの種類があり、それぞれの手法でいくつもの系外惑星が発見されています。
発見のしやすさや、どのような特徴を持った惑星を発見しやすいかなどは発見手法によって変わります。
ここでは、太陽系外惑星の発見方法と、それらの特徴について簡単に紹介しようと思います。
目次:
関連ページ:
発見されている系外惑星の概観
現在までに存在が確認されている太陽系外惑星は 2017 年 6 月の時点で 3000 個を超え、新しい惑星が発見され次第随時更新されています。 年別の系外惑星の発見個数と、その発見手法別に色分けをしたものが次のグラフです。
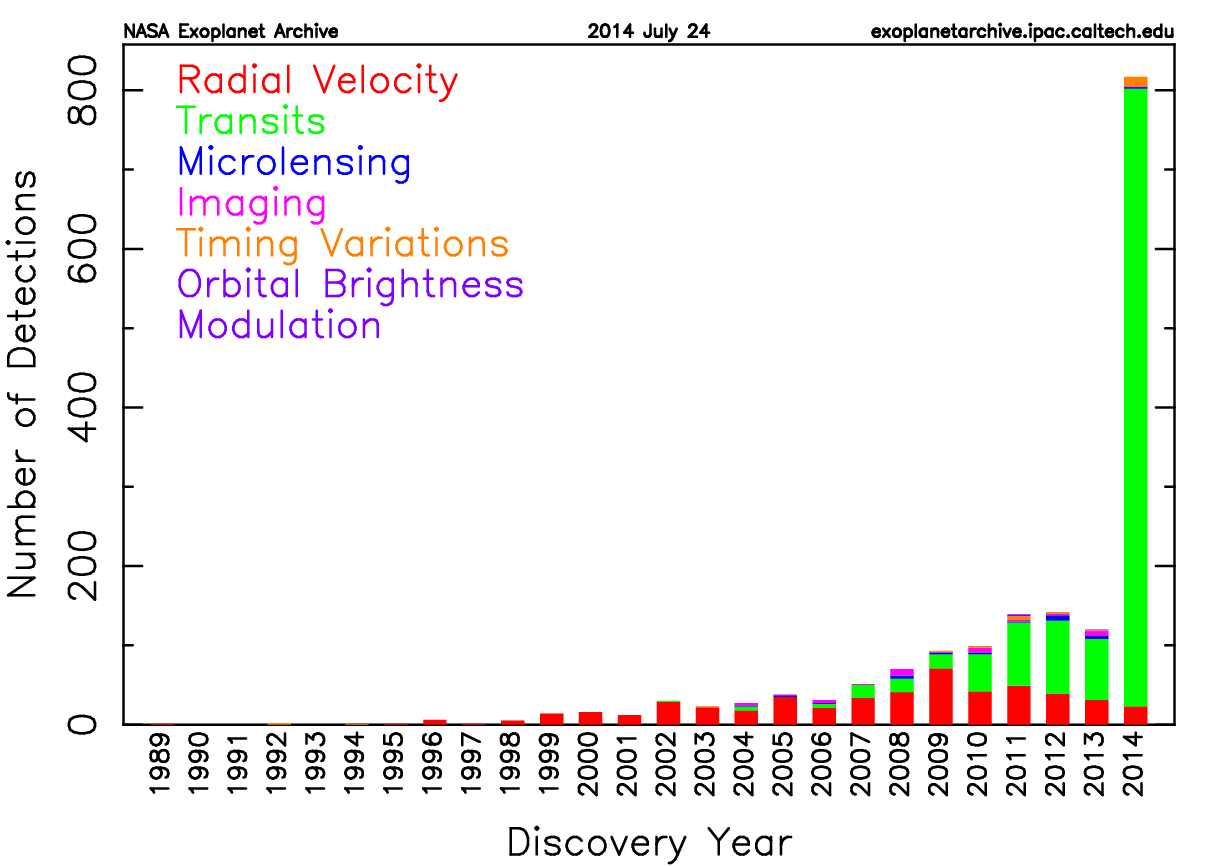
ここ数年の発見個数が非常に多いため全体が見づらくなってしまっています。 そのため、「そろそろ発見個数の縦軸は対数にしたほうがよい」という話さえあります。 (グラフをクリックすると拡大表示します)
このグラフでは、発見年のスタートは 1989 年になっています。 非常に見づらいですが、赤色の "Radial Velocity" で 1 個発見報告があります。 ただしこの天体は、惑星であるか褐色矮星であるかがはっきりしていないため (推定質量が惑星と褐色矮星の境界とされる 13 木星質量前後)、一般には系外惑星の初発見例とは見なされていません。 質量が木星の 13 倍程度を超えると重水素の核融合を起こす事が出来ますが、このような天体は褐色矮星に分類されます。
また 1992 年には 2 つ、グラフ内の表現で言うと "Timing Variations" で発見報告があります。 この 2 つはパルサーの周りを公転する惑星です。 1994 年にも同じ方法でパルサー周りの惑星が発見されています。
1995 年には、"Radial Velocity" で惑星 (ペガスス座51番星b) が 1 個発見されています。 これは、質量が惑星程度である (褐色矮星ではない) ことが判明し、かつ通常の主系列星の周りを回る初めての発見例です。 そのため、1995 年のペガスス座51番星b の発見を持って太陽系外惑星の初発見とする場合が一般的です。
グラフを見ると分かるように、当初は "Radial Velocity" による系外惑星の発見が主流でした。 その後の観測技術の発展によって複数の手法で発見され始めましたが、2000 年代までは "Radial Velocity" による発見例が大部分を占めていました。 流れが大きく変わったのは 2010 年前後で、ここから "Transits" による発見が大幅に増加し、年あたりの新規発見個数では "Radial Velocity" を上回るようになりました。 "Transits" 躍進の原因はトランジット法によって系外惑星を発見する宇宙望遠鏡「ケプラー」の登場であり、2009 年のケプラー打ち上げからわずか数年で、"Radial Velocity" がコツコツと積み上げて来た発見個数を一気に抜き去ることになりました。
2014 年 2 月 26 日には、ケプラーを用いて検出され、その後の検証によって存在が確定した系外惑星が一気に 715 個追加されました (NASA Exoplanet Archive で発表された個数)。 グラフで 2014 年の部分の黄緑が突出しているのはこれが原因です。 この追加によって、これまでに発見されて存在が確定した系外惑星のうち、実に 57% がケプラーによって発見されたものとなりました。 ケプラーによって得られたデータは非常に膨大で、まだ数千個の未確認の惑星候補が残されています (2014 年 8 月時点)。 そのため数百個レベルの追加は今後も起きる可能性があります。
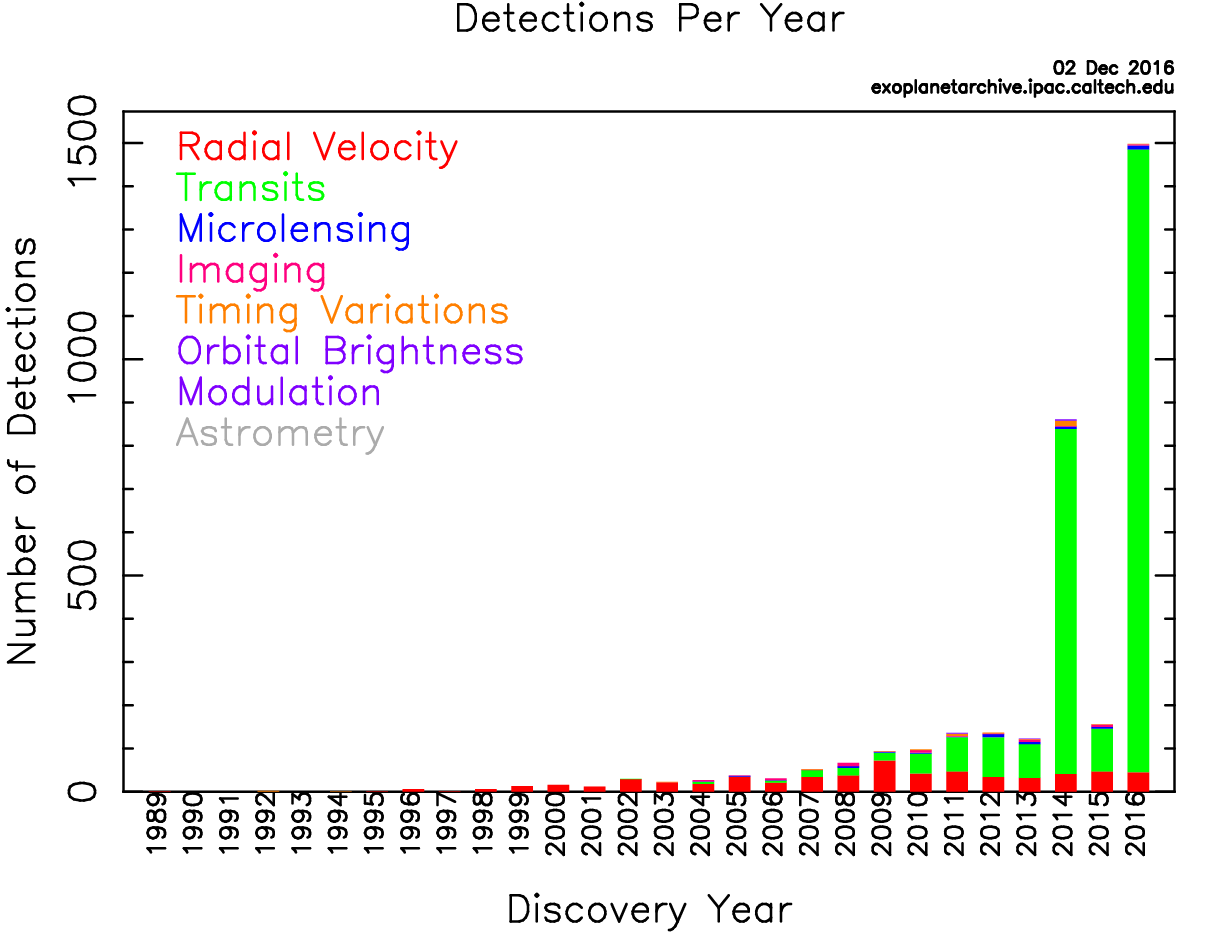
さらに 2016 年 5 月 10 日には、ケプラーを用いて検出された後に存在が確定したものが一気に 1285 個追加されました。 これによって 2016 年の部分のグラフが再び突出することになりました。 この大量の系外惑星の「発見」は、これまでの観測結果を元にした統計的な手法の開発により、ケプラーで検出した多数の惑星候補天体を効率的に検証できるようになったことが原因です。

{kind=link}
{kind=link}
なおこちらのグラフは、系外惑星の累積発見個数とその発見手法を示したグラフです。
以下では、太陽系外惑星を新たに発見したり、検出したりするための様々な手法を紹介します。
系外惑星の発見・検出方法には、大きく分けると直接法と間接法があります。
直接法はその名の通り系外惑星を直接観測する方法ですが、惑星は小さく暗いため検出は非常に難しいです。
それでも近年の観測技術の発展により、発見例は増えて来ています。
間接法は惑星の存在を、惑星が原因で起きる何らかの現象から間接的に知る方法です。
直接撮像 (direct imaging) は、系外惑星からの光を文字通り直接観測する方法です。
「直接観測」と呼ばれることもありますが意味は同じです。
惑星からの放射や、惑星表面で反射された恒星の光は非常に弱いため、直接その光を捉えるためには高い観測技術が必要です。
また、中心星の光に埋もれてしまうと発見出来ないため、中心星の光と惑星の光を分離出来るだけの分解能も要求されます。
中心星と惑星の光度差は非常に大きく、太陽と木星を例にとると可視光領域では数億倍以上の光度差、赤外線領域でも数万倍の光度差があります。
そのため、系外惑星からの光を直接捉えるためには、中心星からの光を取り除くための様々な工夫が行われます。
直接撮像のための技術の代表例が、中心星の部分を隠して観測するコロナグラフ (Coronagraph) です。
元々は、通常時は暗くて観測出来ない太陽コロナを、太陽本体を隠すことによって観測出来るようにするための技術で、それの応用版と言えます。
その他には、干渉計を用いて中心星からの光の逆位相の光を重ね、中心星からの光を打ち消すという手法も存在し、そのための装置はナル干渉計 (Nulling Interferometer) と呼ばれます。
("null" と書いた場合は「ヌル」と呼ぶ事が多いですが、この場合は「ナル」という表記が多いです。
英語発音としては両者の中間くらいです。)
暗い天体を発見するために大型の望遠鏡が用いられますが、地上にある望遠鏡はどうしても地球の大気の影響から逃れる事が出来ません。
地球大気の影響を抑えるために、望遠鏡や建物の形状を工夫したり、大型望遠鏡の建設場所を慎重に選定したり (ハワイ・マウナケアや、チリのアタカマ高地などに大型望遠鏡が集中している理由の一つ) という努力は図られていますが、大気の揺らぎの影響は少なからず受けてしまいます。
コロナグラフやナル干渉計を使って中心星の光の影響を無くすとしても、大気の揺らぎの影響が大きければ観測は上手く行きません。
大気の揺らぎの影響を少しでも抑えるための工夫として補償光学 (Adaptive Optics, AO) という技術が発展しています。
これは、大気の揺らぎによる光の波面の乱れを測定し、それに応じて光を反射している鏡面を変形させることによって、大気の揺らぎによって乱れた波面を元の波面に近付けるという技術です。
大気の揺らぎの測定は、ガイド星と呼ばれる基準の天体の星像の乱れを測定することによって行われますが、観測対象の近くにガイド星に出来る明るい天体が無い場合は揺らぎの測定が困難でした。
天然のガイド星を使って補償光学が適用出来るのは、全天のわずか 1% 程度の狭い範囲だけです。
そのため、地上から上空へ向けてレーザーを照射し、上空 100 km ほどの大気中のナトリウムを励起して発光させ、その光をガイド星として用いるという技術が開発されています。
これをレーザーガイド星 (Laser guide star) と呼び、天然のガイド星が無い領域でも高精度で補償光学を適用することができます。
直接撮像
直接撮像のための技術
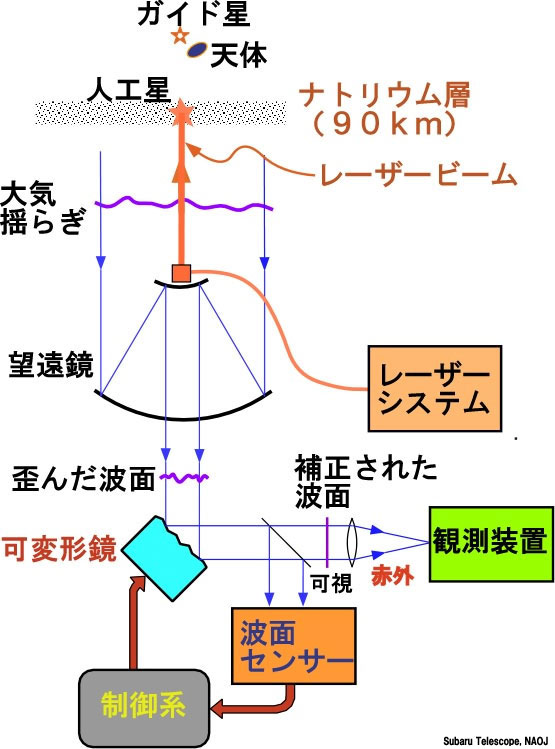
補償光学とレーザーガイド星の概略図。(©国立天文台)
最近ではこれらのコロナグラフやナル干渉計、補償光学などの技術の発展により、大気の揺らぎの影響をかなり除去することができるようになって来ていて、それが直接撮像での系外惑星の発見に繋がっています。
また、ここでは系外惑星の直接撮像の話をメインに書きましたが、これらの技術は天文観測一般で使われている技術です。
たとえば中心星を隠すコロナグラフは恒星周りの円盤の撮影のためにも使われていますし、補償光学は遠方銀河の観測にも力を発揮しています。
上で書いた通り、直接撮像で系外惑星を観測するためには中心星の影響をなるべく低減してやる必要があります。
中心星に近い位置にある惑星は中心星の光に埋もれやすくなるため、直接撮像での検出が難しくなります。
中心星から距離が離れている惑星は中心星からの光に埋もれにくく、惑星からの光を中心星からの光と分離しやすくなるため、直接撮像による系外惑星探査は非常に遠方の惑星を発見するのに適した方法です。
また、惑星の温度が比較的高い場合は赤外線での熱放射が強くなるため、赤外線を用いた直接撮像で観測しやすくなります。
木星の場合は形成から 46 億年あまりが経過して冷えていますが、形成間もない惑星は表面温度が高くなっています。
そのため、年齢が若い恒星の周りにある、まだ熱い惑星 (特に巨大ガス惑星) は検出しやすくなります。
中心星が明るい場合は中心星の光の影響を低減することが難しいため、質量が小さく暗い恒星の周りの惑星の方が発見しやすくなります。
直接撮像で惑星を探査する場合は、これらの事情を勘案して観測しやすい対象を選定しています。
直接撮像のターゲット

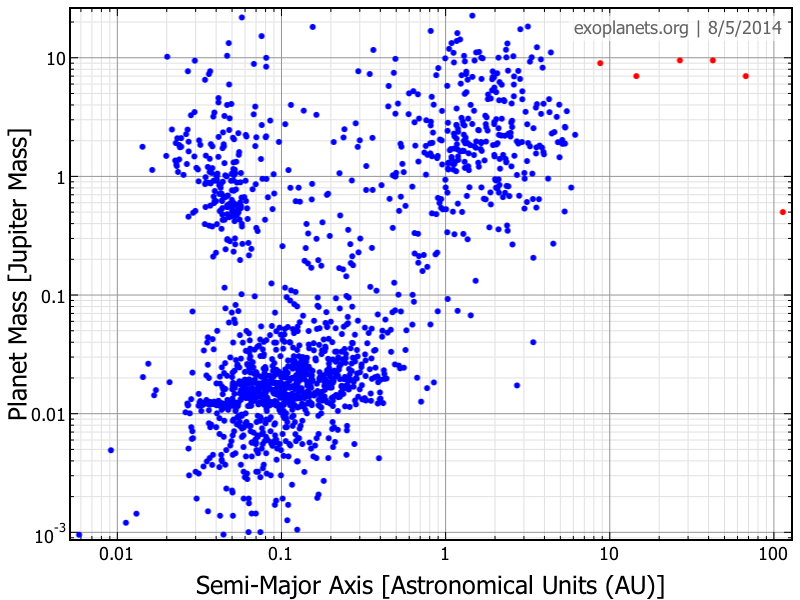
現在までに発見されている系外惑星のプロット。横軸が軌道長半径 [AU]、縦軸が惑星質量 [木星質量] で、両軸ともに対数スケールです。
赤い点で示してあるのが直接撮像で発見された惑星で、青がその他の方法によるものです。画像は Exoplanet Orbit Database より。2014 年までのグラフはこちら
{kind=link}
上のグラフは、系外惑星を軌道長半径と惑星質量別にプロットしたものです。
赤い点で示したものが、直接撮像によって発見された系外惑星です。
横軸は軌道長半径で、単位は天文単位 (AU) です (地球の軌道長半径が 1 AU)。こでは中心星と惑星の平均的な距離に対応しています。
縦軸は惑星質量で、単位は木星質量です。
これを見ると分かるように、直接撮像によって発見されている系外惑星は、軌道長半径が 10 AU から 100 AU 程度と非常に離れた場所にある、非常に重い惑星が多いです。
直接撮像によって初めて惑星候補天体が発見されたのは 2004 年 4 月のことです。
褐色矮星である 2M1207 の周囲に、2M1207b が発見されました。
このとき観測に用いられたのは、チリにある超大型望遠鏡 (Very Large Telescope, VLT) で、赤外線を用いた直接撮像でした。
2M1207b の推定質量は木星の 3 倍から 10 倍と大きな幅があるものの、褐色矮星の下限値である 13 木星質量は十分下回っています。
また中心星との推定距離は 40 AU 程度と大きく離れています。
この系の年齢は数百万年程度と見積もられており、天体としては非常に若いです。
(Song et al. (2006) によると年齢は 800 万年)
しかし、この天体を惑星とみなすかどうかには議論があります。
褐色矮星となる質量よりも十分に小さければ惑星と見なす、つまり単純に質量だけで惑星かどうかを決めるのであれば、この天体は惑星とみなすことができます。
一方で、惑星かどうかの判断には、天体の形成メカニズムも考慮するべきという意見もあります。
通常の惑星は、中心星周りの原始惑星系円盤の中で形成されると考えられているため、分子雲から中心星 (この場合は2M1207) と一緒に直接形成された場合は、惑星というより「準褐色矮星 (sub-brown dwarf)」と呼ぶべきだという意見もあります。
中心星の 2M1207 の質量は 24 木星質量、2M1207b の質量は 3 - 10 木星質量なので、中心星質量/惑星質量比は 2 - 8 倍と非常に小さい値になっています。
例えば太陽系の場合、太陽質量/木星質量比はおよそ 1000 倍なので、この系の質量比がいかに小さいかは一目瞭然です。
このような質量比の天体は、"惑星形成的" な形成メカニズムでは形成できず、"星形成的" なメカニズムで形成されるだろうと考えられています。
この天体の形成過程が "惑星形成的" だったのか、それとも "星形成的" だったのかを正確に判別出来るかは未知数です。
そのためこの天体を惑星とみなすか、それとも準褐色矮星とみなすか、まだはっきりとした結論や見解は決められていません。
多くの系外惑星のカタログでは、このような天体もひとまず惑星とみなして登録されています。
また、国際天文学連合 (IAU) のワーキンググループでは、「惑星質量天体 (planetary-mass object)」という名称を用いています。
2M1207b を惑星とみなす場合は、この天体が直接撮像による初発見例となります。
また、褐色矮星周りに初めて見つかった惑星でもあります。
2M1207b の発見の後も、直接撮像による系外惑星候補天体の発見は何例か続きました。
おおかみ座GQ星b (GQ Lupi b) や、がか座AB星b (AB Pictoris b) などがその例です。
しかしそれらの推定質量はどれも木星質量の 10 倍から数十倍となっており、巨大ガス惑星と褐色矮星の境目あたりの質量を持つものばかりだったため、惑星であると確定したものはありませんでした。
その後、2008 年 9 月に 1RXS J160929.1−210524b という天体が発見されました。
この天体も赤外線を用いた直接撮像による発見です。
1RXS J160929.1−210524b の質量の推定値は 8 木星質量で、誤差を考慮しても 13 木星質量より小さいため、この天体は惑星であると見なされています (ただし質量の推定値に関しては異論も出されており、13 木星質量を超えるとする結果もあります)。
中心星からの距離は 330 AU 程度と、この惑星も大きく離れた位置に発見されています。
中心星の 1RXS J160929.1−210524 は 0.85 太陽質量を持つ「前主系列星 (pre-main-sequence star)」で、星の中心部で核融合を始める直前の段階にあります。
そのため、この惑星は直接撮像を用いて通常の星の周りに初めて発見された系外惑星とみなされています。
この系の年齢も数百万年程度 (Lafreniere et al. (2008) によると 500 万年) と推定されていて、非常に若い系であることが分かります。
なお、この天体が発見されたのは 2008 年ですが、この天体が中心星に重力的に束縛された惑星であると判明したのは 2010 年になってからです。
発見直後は、この天体が中心星を周回する惑星なのか、偶然近くに写って見えるだけの天体なのかの判断は難しく、時間をおいて観測して軌道運動を解析したり、両者の固有運動が一致しているかを調べることによって、重力的に束縛されているかどうかが分かります。
同年の 2008 年 11 月には、ハッブル宇宙望遠鏡によって 1 等星のフォーマルハウトを回るフォーマルハウトb (Fomalhaut b) が発見されています。
フォーマルハウトb の推定質量は 3 木星質量未満であり、直接撮像で発見された惑星や惑星候補天体の中では最も軽い部類に入ります (2018 年 5 月現在では最小)。
また、軌道長半径は 115 AU で、やはり中心星から大きく離れた軌道を持つ天体です。
フォーマルハウトの周囲には塵の円盤が存在する事が分かっていて、この分布の様子から惑星が存在する可能性が以前から指摘されていました。
これまでの直接撮像では赤外線観測による発見ばかりでしたが、フォーマルハウトb は可視光による直接撮像で初めて発見された系外惑星となりました。
さらにフォーマルハウトb の発見報告と同日に、HR 8799 の周囲を公転する HR 8799b, HR 8799c, HR 8799d の 3 つの惑星の発見が公表されました。
W・M・ケック天文台、ジェミニ天文台における赤外線領域での直接撮像による発見で、直接撮像で同時に複数の惑星が発見された初めての例です。
これらの惑星は、軌道長半径がそれぞれ 68, 28, 24 AU と離れた軌道を持ち、推定質量はそれぞれ 7, 10, 10 木星質量となっています。
HR 8799 の系も、推定年齢は 6000 万年程度と比較的若い系です。
この系では、2010 年にさらなる惑星 である HR 8799e が、同じく直接撮像で発見されています。
HR 8799e は先に発見されていた 3 惑星より内側の 14.5 AU の位置を公転しています。
既に発見されていた 3 個の惑星よりも内側にあって中心星の光に埋もれてしまったため、最初の観測では発見出来なかったと考えられています。
このような観測の中には、あるグループによって発見が報告された後に、別の望遠鏡で既に撮影されていた事が判明したという場合がしばしばあります。
例えば、HR 8799 周りの 3 惑星の発見報告は 2008 年ですが、1998 年にハッブル宇宙望遠鏡で撮影された画像データを再解析した結果、HR 8799b が写っていたことが分かっています。
また、2002 年にすばる望遠鏡で撮影された画像にも、HR 8799b が写っていた事が後になって分かっています。
なおフォーマルハウトb に関しては、これが本当に惑星であるかを含め、性質に関しては議論が錯綜しています。
フォーマルハウトb のスペクトルが、このタイプの惑星に期待されるものとは大きく異なっている事が、議論が起きている主な原因です。
そのため、周囲に大量の微惑星をまとった小型の惑星であるとする説や、原始惑星が衝突するなどして生成した塵の塊であるという説、さらには背景にある中性子星であるという説まで提案されており、真の性質についてはまだ不明な点が多いです。
直接撮像で惑星からの弱い光を検出するためには、一般に大きな望遠鏡が必要です。
また、既に書いた通り高精度の観測手法と補正技術が必要となります。
そのため、超大型望遠鏡 VLT やすばる望遠鏡、W・M・ケック天文台、ジェミニ天文台といった大型の地上望遠鏡を用いた観測が行われています。
また、大気の影響が無い宇宙空間からも、ハッブル宇宙望遠鏡やスピッツァー宇宙望遠鏡などの、高性能の望遠鏡を用いた観測が行われています。
将来的な大型地上望遠鏡としては、Thirty Meter Telescope (TMT, 30メートル望遠鏡) の計画があります。
これは名前の通り口径が 30 メートルの巨大望遠鏡計画で、ハワイのマウナケアに建設が計画されています。
直接撮像のみならず、半径が小さい惑星のトランジット観測などにも有効だとされています。
最近まではまだ計画段階でしたが、2014 年 7 月には正式に建設開始が決定しました。[参考リンク]
TMT は 2021 年度末の完成を目指していました (2014 年の建設開始当時)。
ただし現地住民の反対運動もあり (マウナケアは現地住民にとっての聖地であるため)、建設工事が始まったものの計画通りに行くかは不透明になっています。
建設工事の差し止め処分なども発生しており、最悪の場合は TMT の建設候補地をハワイからカナリア諸島へ移すという計画もあるため、完成の先行きはかなり流動的です。
2018 年 5 月現在では、完成見込みは 2027 年までずれ込んでいます。
その他の大型地上望遠鏡計画には、チリのラスカンパナス天文台に建設中の 24.5 メートル口径の Giant Magellan Telescope (GMT, 巨大マゼラン望遠鏡) や、同じくチリの Cerro Armazones に建設されている、39.3 メートル口径の European Extremely Large Telescope (E-ELT, 欧州超巨大望遠鏡) などがあります。
系外惑星の直接撮像観測を行える次世代宇宙望遠鏡の計画も複数存在しています。
例えば、ハッブル宇宙望遠鏡の後継機と位置付けられている NASA の宇宙望遠鏡に、ジェームズ・ウェッブ宇宙望遠鏡 (James Webb Space Telescope, JWST) があります。
JWST はハッブル宇宙望遠鏡とは異なり、可視光ではなく赤外線での観測を行う赤外線宇宙望遠鏡です。
ハッブル宇宙望遠鏡と同様に汎用宇宙望遠鏡ですが、系外惑星の赤外線での直接撮像による発見・観測も主要目標のひとつとなっています。
JWST は当初は 2011 年頃の打ち上げを目標としていましたが、開発の遅れなどにより打ち上げ予定日時が繰り返し延期となっており、開発費も大幅に増大しています。
2016 年 11 月には主鏡の組み立てが完成し、2018 年 10 月の打ち上げが予定されていました。
しかし機器の統合が遅れていることから、打ち上げは 2019 - 2020 年と更に遅れることが発表されています。
その他には、日本の JAXA を中心とし、NASA や ESA なども協力して進められている宇宙望遠鏡 SPICA (Space Infrared Telescope for Cosmology and Astrophysics) では、赤外線領域でコロナグラフを用いて系外惑星の検出をする事もミッションの目的の一つとなっています。
SPICA は 2027 - 2028 年の打ち上げを目標としていますが (2018 年 5 月現在)、計画が確定しているわけではないため、依然として今後の計画は流動的です。
また、NASA が中心となって進めている赤外線宇宙望遠鏡に WFIRST (Wide-Field Infrared Survey Telescope)、あるいは WFIRST-AFTA (Wide-Field Infrared Survey Telescope - Astrophysics Focused Telescope Assets) があります。
直訳すると「広視野赤外線サーベイ望遠鏡」となります。
また WFIRST は一般に「ダブリュファースト」と読まれます。
WFIRST はダークエネルギーに関する観測を中心に据えていますが、コロナグラフを用いた系外惑星の直接撮像も主要な目的のひとつとされています。
WFIRST は 2020 年代中盤の打ち上げを目指して計画が進められてきましたが、2018 年 2 月に公表されたアメリカの宇宙政策の方針によると、月探査などその他の計画を優先するために予算が付かないなど、厳しい状況となっています。
その他、かつては NASA による Terrestrial Planet Finder (TPF, 地球型惑星探査機) の計画もありました。
こちらは、複数の小型宇宙望遠鏡を組み合わせて赤外線干渉計として用い、中心星の光をナル干渉計で打ち消して惑星を直接撮像する TPF-I と、大型の光学望遠鏡でコロナグラフを用いて惑星を直接撮像する TPF-C の 2 つのコンセプトが採用されていました。
"I" は赤外線を意味する infrared、"C" は coronagraph から来ています。
TPF-C は 2014 年頃、TPF-I は 2020 年までの打ち上げを目指していましたが、それぞれキャンセルとなりました。
直接撮像によって得られるのは、惑星表面での反射光と、惑星自身の熱放射に関する情報です。
多くの場合は中心星から遠く離れており、若くて比較的温度が高いガス惑星を見ているため、特に赤外線領域での観測の場合は惑星からの熱放射をメインに見ていることになります。
直接撮像で得られたデータを元にして、惑星の質量を推定することができます。
形成直後のガス惑星は高温 (高エントロピー状態) で、その後輻射で熱を捨てることによって温度が下がって行きます (ガス惑星の熱進化)。
時間が経過すれば温度は低くなり、また時間による温度変化の様子はガス惑星の質量に依存します。
惑星の表面温度は、直接撮像によって得られたデータから推定する事が出来ます。
そのため、その系の年齢が判明している場合は、系の年齢と推定された表面温度から、ガス惑星の質量を推定する事が出来ます。
この場合、系の年齢の見積もりや、直接撮像の観測の誤差、ガス惑星の大気モデルの違いによる誤差などが、質量を決定する時の誤差となります。
ただしガス惑星の熱進化においては、初期条件が大きく変わる可能性がある事が最近指摘されています。
惑星形成時に非常に高温である場合 (hot start) と、形成時に熱をあまり取り込めず比較的低温である場合 (cold start) では、その後の熱進化の様子が異なります。
おおまかには、重力不安定起源で一気にガス惑星を形成するモデルでは hot start 寄りの熱進化、コア集積によってまずコアを作ってそこにガスが降着するモデル (標準的なモデル) では cold start 寄りの熱進化になります (単純にそうとは言い切れない可能性がある事を示す研究もあり、まだ不定性が大きい部分です)。
そのため、これの効果を考慮に入れると推定質量の誤差は非常に大きくなります。
この hot start と cold start の違いによる影響は、年齢が若いうちは非常に大きいため、若い系でのガス惑星の質量推定は非常に誤差の大きなものになります。
質量が違うため表面温度が違うのか、初期条件の温度が違ったため表面温度が違うのかの判別が困難だという事です。
しかしある程度時間が進むと、初期条件の違いによる影響は小さくなるため、推定質量の誤差も小さくなります。
直接撮像では惑星の位置が直接分かるため、時間をおいて撮影すると惑星の位置が動いているのが直接確認出来ます。
そのため、長時間の観測をすることによって軌道の決定が可能ということになります。
いくつかの惑星で惑星の公転に伴う位置の変化が観測されていて、それを元に軌道要素が求められています。
2014 年になって、系外惑星の自転速度が初めて直接観測されました。
がか座ベータ星b (beta Pictoris b) はおよそ 7 木星質量の惑星で、直接撮像によって発見されました。
この惑星からの光を分光観測し、赤外線領域での一酸化炭素の吸収線から自転速度を求めた結果、赤道領域で時速 10 万 km 程度、自転周期にしてわずか 8.1 時間という速い自転をしていることが判明しました。
これは、系外惑星の自転が測定された初めての例です。
惑星の自転速度は、太陽系での傾向から質量が大きいほど速いと予想されていましたが、それを裏付ける観測結果となりました。
条件次第では惑星からのスペクトルを直接観測出来るため、このように自転速度を測定出来たり、大気のスペクトルから大気組成に関する情報を得られる場合もあります。
複数の波長での観測を元に惑星の放射スペクトルを測定し、惑星大気の理論モデルと組み合わせることで、大気成分の推定や雲の有無などを調べることも出来ます。
直接撮像による発見
2M1207b
1RXS J160929.1−210524b
フォーマルハウトb と HR 8799b, c, d
直接撮像による観測
主な観測
将来的な観測 (地上観測)
将来的な観測 (宇宙望遠鏡)
直接撮像で分かる事
惑星質量
軌道要素
スペクトルと自転・大気要素
| 検出に有利 | 中心星から大きく離れた軌道を持つ (中心星と惑星を分離しやすい) |
| 系の年齢が若く、表面温度が高い巨大ガス惑星 (赤外線領域で明るい) | |
| 中心星が暗い場合 (中心星と惑星を分離しやすい) | |
| 検出に不利 | 中心星に近い軌道を持つ (中心星に埋もれてしまう) |
| 中心星が明るい場合 (同上) | |
| 得られる情報 | 惑星の表面温度 |
| 惑星質量 (系の年齢やモデル等に依存) | |
| 惑星の軌道要素 | |
| その他 | 惑星のスペクトルを直接得る事が可能 |
| 惑星の (視線方向の) 自転速度の検出例あり |
視線速度法
視線速度法 (radial velocity) は、惑星が恒星の周りを公転運動することによって恒星がわずかに揺れ動く現象を、恒星の視線速度の変化から検出する手法で、間接法の一種です。 恒星の動きを、恒星からの光を分光観測してドップラーシフトから測定する手法であるため、「ドップラー分光法 (Doppler spectroscopy)」や「ドップラー法」と呼ばれることもあります。
"惑星は中心星の周りを回っている" という表現がよくなされますが、厳密に言うと惑星と中心星は、お互いの重心を中心として公転しています。 惑星と恒星では質量差が非常に大きいため、近似的には惑星が恒星の周りを公転しているとみなせますが、実際には恒星も惑星の公転に伴ってわずかに公転運動をしています。 そのため恒星の運動を測定することで、惑星の存在を間接的に知る事が出来ます。 視線速度法では、恒星からの光のドップラーシフトを検出することによって恒星の運動の様子を観測します。
恒星からの光の中には、恒星中に含まれる物質によって光が吸収されることによって生じる吸収線があります。 恒星からの光を分光して観測すると、ある特定の波長の光が吸収されて吸収線になっている事がわかります。 ある物質が特定の波長の光をよく吸収するためにこのような吸収線が現れますが、恒星が運動をしている場合は恒星の速度の分だけ吸収線の波長が本来の波長よりずれます。 これは光のドップラー現象として知られている現象です。 そのため、恒星からの光を分光観測し、吸収線の時間変動を調べることによって恒星の動きが分かります。
恒星の動きは視線方向に投影された成分しか分からないため、測定している量も視線速度成分ということになります。
視線速度法の物理
視線速度法に関する簡単な物理を紹介します。 視線速度の変動は、振幅を \(K\) として \begin{align*} v=K\left[\cos\left(f+\omega\right)+e\cos\omega\right] \end{align*} と書けます。 \(\omega\) は近点引数 (argument of pericenter) で、惑星軌道の近点の方向を表す量です。 \(f\) は真近点離角 (true anomaly) で、惑星が軌道のどの位置にいるのかに対応する変数です。 \(e\) は軌道離心率です。 離心率がゼロの円軌道を考えると、視線方向の速度はサインカーブの形になることが分かります。 離心率が大きい場合は括弧の中の 2 項目の効果が効いてくるため、サインカーブからずれた形状になります。
振幅の大きさ \(K\) は、 \begin{align*} K=\frac{2\pi}{P}\frac{a_{\ast}\sin i}{\sqrt{1-e^{2}}} \end{align*} とあらわされます。 \(P\) は軌道周期、\(a_{\ast}\) は恒星の軌道長半径、\(i\) は惑星軌道面に垂直な軸と視線方向が成す角度です。 視線方向と軌道面が平行 (つまり軌道面に垂直な軸とは垂直) の場合は \(i=90^{\circ}\) になるため \(\sin i=1\) となりますが、視線方向と軌道面が垂直の場合 (惑星の軌道面を真上から "見下ろす" ような位置関係から見ている場合) は \(i=0^{\circ}\)、\(\sin i=0\) となるため視線速度の変動が観測出来ないことが分かります。
中心星の質量を \(\Mstar\)、惑星の質量を \(m\)、惑星の軌道長半径を \(a\) とすると、 \begin{align*} \frac{a}{a_{\ast}}=\frac{\Mstar}{m} \end{align*} という関係があります。 また、惑星の軌道長半径と軌道周期の間には、 \begin{align*} P=2\pi\sqrt{\frac{a^{3}}{\mu}} \end{align*} という関係があります。 ここで、\(\mu=G\left(\Mstar+m\right)\) です。 これらの関係式を用いて、視線速度変動の振幅を計算すると、 \begin{align*} K\simeq\frac{1}{\sqrt{1-e^{2}}}\left(\frac{2\pi G}{P}\right)^{1/3}\frac{m\sin i}{\left(\Mstar+m\right)^{2/3}} \end{align*} となることが分かります。 軌道周期 \(P\) の代わりに軌道長半径を用いて表すと、 \begin{align*} K\simeq\frac{1}{\sqrt{1-e^{2}}}\left(\frac{G}{a}\right)^{1/2}\frac{m\sin i}{\left(\Mstar+m\right)^{1/2}} \end{align*} となります。
視線速度変動の実際の観測例は以下のようになります。
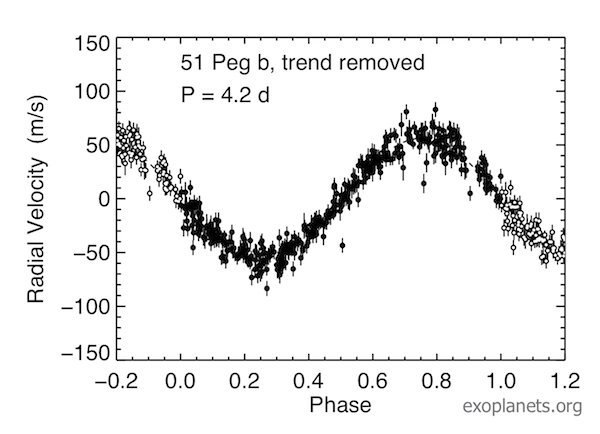
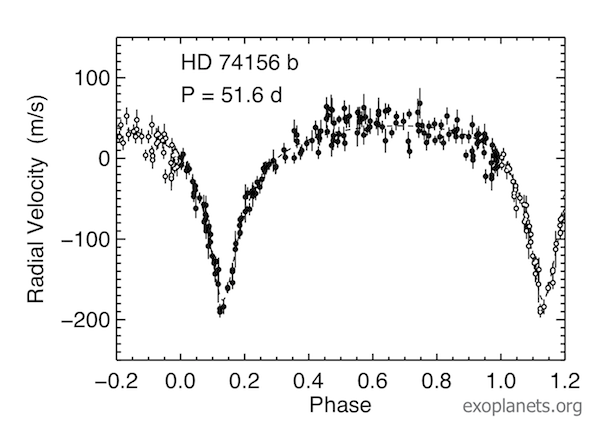
左がペガスス座51番星 (51 Peg)、右が HD 74156 の視線速度の変動です。 横軸が時間の経過に対応し、縦軸が視線速度の変化を示しています。 ペガスス座51番星b の離心率は 0.01 程度と小さいため、視線速度の変動はきれいなサインカーブを示します。 HD 74156b の離心率は 0.630 と比較的大きな値を持つため、視線速度の変動はサインカーブからかなりずれた形状になっています。 画像は 2 枚とも Exoplanet Orbit Database より。
図に示したのは、惑星ペガスス座51番星b が公転していることによる、中心の恒星ペガスス座51番星の視線毒度の変動と、惑星 HD 74156b が公転していることによる、中心の恒星 HD 74156 の視線速度の変動のデータです。 HD 74156b は大きな軌道離心率を持つため、サインカーブからは大きく外れた曲線になっています。 一方ペガスス座51番星b のように軌道離心率が小さい場合は、綺麗なサインカーブとして観測されます。
視線速度変動の振幅が大きい方が検出がしやすくなります。 式の形より、軌道長半径が小さく、質量が大きい惑星の方が発見しやすいことになります。
太陽系を例にとると、軌道面に平行な方向から観測した場合、木星の公転による太陽の視線速度はおよそ 13 m/s となります。 地球の場合はおよそ 10 cm/s と非常に小さくなり、地球程度の軽い惑星の検出のためには高精度の観測が必要になります。 ホットジュピターのような、中心星に非常に近い巨大ガス惑星の場合は検出しやすくなります。 例えば軌道長半径が 0.05 AU で 1 木星質量の惑星の場合は、中心星の視線速度はおよそ 130 m/s となり、木星による視線速度の 10 倍近くになります。
なお、角度 \(i\) は視線速度法からは求めることができないため、別の方法で観測する必要があります。 一般に \(i\) を観測から決定する事は難しく、惑星の周囲に円盤が残っている場合は、円盤の傾きから測定する事は可能です。 ただしこの場合は、円盤面と惑星の軌道面が一致しているという仮定が入ります。 そのため多くの場合、惑星の質量に関する情報は \(m\sin i\) の形でしか得る事は出来ず、\(\sin i\) の部分の不定性は残ることになります。 そのため、視線速度法で得られる惑星の質量は真の質量ではなく、最小質量ということになります (後述)。
視線速度法の模式図やイメージ等は、国立天文台 太陽系外惑星探査プロジェクト室の近赤外高分散分光器のページや、理科年表オフィシャルサイト/天文部:太陽系外惑星、灼熱の巨大惑星、超巨大コアをもつ惑星のページなども参考にしてください。
視線速度法の場合は、惑星による恒星の動きを、恒星からの光を分光観測することによって突き止めます。
吸収線の位置が本来の位置からどれだけずれているかを高精度で測定する必要がありますが、そのためには吸収線のずれを何かの基準と比較する必要があります。
かつては地球大気による吸収線を基準として、恒星からの光の吸収線の変動を測定していました。
しかし地球大気の吸収線は常に一定ではなく変動があるため、その分測定精度は悪くなります。
この方法での測定精度は、数10 m/s から数100 m/s 程度になるため、太陽系の木星程度の惑星を検出出来るギリギリのラインになります。
その後、ヨウ素ガス吸収セルを用いたガスセル法 (あるいはヨードセル法) が開発されて精度が大きく向上しました。
これは、恒星からの光を一旦ヨウ素ガスの入ったカプセルに通すことによって、ヨウ素による吸収線を星からのスペクトルに刻み込む方法です。
ヨウ素ガスは可視光領域に 1000 本近い吸収線を持っています (ヨウ素の他にフッ化水素などを用いることもあります)。
手元にあるヨウ素ガスの吸収線は変動しないため、ヨウ素ガスによる吸収線の位置を基準にして、恒星の吸収線の移動を精度よく測定する事が可能になります。
ガスセル法によって測定精度は一気に 数m/s 以下へと向上し、より軽い惑星や、軌道長半径が大きい惑星の検出も可能になりました。
利点が非常に大きいガスセル法ですが、ヨウ素のスペクトルを刻み込んでいるため、星本来のスペクトルの情報が失われるという点や、ガスを通過させる分だけ光子数が減少するという欠点も存在します。
また、ヨウ素の吸収線は可視光領域にあるため、それ以外の波長域での観測の場合はガスセル法を用いる事が難しくなります。
最近では、同時比較光源光取得法 (simultaneous reference method) という手法が開発されています。
これは、恒星からの光と比較用光源 (アルゴン-トリウムランプなど) からの光を同時に取得し、検出器上に並べて比較をする方法です。
この方法では、可視光線以外の広い波長域での比較が出来る点や、ガスを通さないため光子数の減少が無い点、恒星からのスペクトルはそのまま保たれている点など、ガスセル法の欠点が解決されています。
広い波長域で比較出来るという事は、多数の吸収線の変動を精度よく測定する事が出来るという事であり、測定精度は吸収線の本数が多いほど良くなるため観測精度の向上につながります。
同時比較光源光取得法では、わずかな機器の変化で精度が悪くなってしまうため、機器の形状変化を引き起こす温度変化を少しでも低減したり、比較用光源の光の導き方を安定化することで高精度を保ちます。
例として、光を検出器へ導く際に光ファイバーを用いて安定化するという手法があります。
これらの技術革新によって、測定精度は 1 m/s を切り、 0.2 m/s の測定精度を達成したとの報告もあります。
この程度の測定精度になると、地球型惑星の発見も可能になってきて、実際に岩石惑星と思われる惑星も発見されて来ています。
いずれ、地球と同じような系外惑星 (視線速度が 10 cm/s 程度) の視線速度法による検出も可能となる事が期待されます。
視線速度法では、視線速度の精度よい測定のために恒星からの光の高分散分光を行います。
高分散分光のためには恒星からの光がある程度明るい必要があるため、観測するターゲットは太陽系近傍の恒星などの実視等級が明るい恒星が多く選ばれます。
大型の望遠鏡を使った場合でも、実視等級で 9 等程度が限度であり、それより暗い恒星では視線速度法による観測が難しくなります。
そのため、M 型主系列星 (赤色矮星) のような低温で暗い低質量星は、視線速度法による観測には不向きとなります。
また、逆に高温な A 型主系列星や B 型主系列星でも観測が難しくなります。
これは、これら大質量で高温の恒星の場合は吸収線が非常に少ない場合が多く、精度の良い観測ができないことが原因です。
さらに、大質量星は寿命が短いため必然的に年齢も若いことになりますが、年齢が若い恒星は自転が高速である傾向にあります。
自転が高速の場合は、恒星の自転によるドップラーシフトで吸収線が広くなってしまい、精度の良い視線速度の観測が難しくなります (吸収線がシャープな方が測定精度は良い)。
これらの理由から、A 型星や B 型星のような大質量星は、そもそも視線速度法による観測ターゲットに選ばれる事が少なくなります。
そのため、視線速度法で観測する対象には、太陽系から比較的近距離にある恒星が選ばれることが多くなります。
その他には、赤色巨星の場合は脈動の影響が大きいため視線速度法による観測にはあまり向きませんが、赤色巨星へと進化している段階の恒星であれば可能です。
また主系列段階では観測に不向きだった A 型星や B 型星では、主系列段階を終えて巨星へと進化すると、表面温度が下がって吸収線が増える事や、膨張して自転速度が遅くなることによって、視線速度法による高精度の観測が出来るようになります。
最近では、視線速度法では観測が難しかった高速自転している高温の恒星 (つまり広がったスペクトル線を持つ) に対して、惑星がトランジットしている最中のスペクトル線の形状の変化を追うことによる惑星の検出・確認に成功しています.
この手法は Doppler tomography (ドップラートモグラフィー) と呼ばれています。
この手法は視線速度法とは異なり、トランジット法と分光観測の組み合わせによるものですが、視線速度法では検出や確認が難しい対象での観測手段として注目されています.
また、視線速度の振幅の式からは、中心星の質量 \(\Mstar\) が小さい方が振幅は大きくなることが分かります。
これは軽い恒星の方がより振り回されやすくなることを意味しています。
ただし、軽い恒星ということはすなわち暗く観測しづらいということなので、軽いほど有利と言い切れるわけではありません。
原理的には、恒星が惑星を持っていれば恒星の視線速度の変動が起きるため、惑星の検出は可能です (軌道面に垂直な方向から見ている場合を除く)。
そのため、観測精度の問題を無視すれば、惑星を持っていた場合の検出確率は非常に高くなります。
ただし、先に出て来た式から分かるように、軌道長半径が大きく、惑星が軽い場合は視線速度の振幅が小さくなり、検出は難しくなります。
中心星に近く質量の大きな惑星の場合は発見しやすいですが、質量が軽い惑星が発見出来るかどうかは、中心星の質量と軌道長半径、観測機器の精度次第となります。
また、軌道長半径が大きくなると惑星の公転周期が非常に長くなります。
視線速度の変動を検出するためには、少なくとも軌道周期と同じくらいの期間継続して観測する必要があるため、あまり公転周期が長い惑星の場合は検出しにくい傾向があります。
最近では視線速度法での観測プロジェクトが始まって長期間続いている例があるため、10 年を超えるスパンの観測データの蓄積から、比較的遠方の長周期の惑星が検出されることも多くなっています。
視線速度法によって、初めて系外惑星候補の存在が疑われたのは、1988 年 7 月のことです。
Bruce Campbell らによる観測から、実視等級 3.22 の明るい K 型主系列星であるケフェウス座ガンマ星 (gamma Cephei) の周りに、惑星質量の天体の存在が疑われました。
厳密にはケフェウス座ガンマ星は連星になっており、主星であるケフェウス座ガンマ星A から伴星であるケフェウス座ガンマ星B の影響を取り除いた結果、"3つ目の天体" の存在が示唆されました。
翌年の 1989 年には、別のグループによって同様の報告が上がりました。
視線速度の振幅から求めた 3 体目の天体の最小質量は木星質量よりやや重い程度で、惑星である可能性が高いとされました。
しかしこの観測結果は、観測精度が十分ではなかったという理由により、惑星の発見報告は 1992 年に撤回されました。
その後、2002 年 9 月になって、Artie P. Hatzes らによる高精度の観測によりケフェウス座ガンマ星の周囲に惑星が "再発見" され、ケフェウス座ガンマ星b (gamma Cephei b) と名付けられました (あるいはケフェウス座ガンマ星Ab, gamma Cephei Ab)。
1988 年に発見を報告した Campbell もこの観測グループに名を連ねています。
この観測によると、推定の最小質量は 1.8 木星質量です。
存在が疑われたものとしては 1988 年と一番早いですが、観測精度が十分ではなく発見報告も撤回されているため、ケフェウス座ガンマ星b の発見報告年は 2002 年 (多くのカタログでは、2003 年と記載) となっています。
そのため、惜しくも系外惑星の初発見例の座を逃すこととなりました。
次に視線速度法を用いた系外惑星候補の発見が報告されたのは、1989 年 5 月のことです。
HD 114762 という F 型主系列星の周りに、HD 114762b が発見されました。
ただし当時は惑星や惑星候補天体への命名の慣習は無かったため、David Latham らによる原論文では HD 114762b という表記は一切無く、単に伴星を意味する "companion" と呼ばれています。
視線速度の振幅から求めた天体の最小質量はおよそ 11 木星質量程度で、巨大ガス惑星と褐色矮星の境目である 13 木星質量に近い値になっています。
この天体の質量が下限値に近ければ巨大ガス惑星ということになりますが、軌道面の角度が判明していないため真の質量は不明です。
原論文での報告においても、"惑星の可能性があるが褐色矮星である可能性が高い" というニュアンスの表現となっています。
後述するように、真の質量は統計的には最小質量よりやや大きいため、この天体も褐色矮星である可能性が高いと見なされています。
惑星ではない可能性が完全に排除されたわけではありませんが、一般的には HD 114762b は惑星とは見なされておらず、従って視線速度法による惑星の初発見例とも見なされていません。
ただし、多くの系外惑星のカタログには掲載されています。
1995 年 10 月に、実視等級 5.49 の G 型主系列星であるペガスス座51番星 (51 Pegasi) の周りを公転する天体、ペガスス座51番星b (51 Pegasi b) が発見されました。
こちらも同様に、"b" を付けて惑星名とする慣習がまだ無かったため、Michel Mayor と Didier Queloz による原論文では単に "Jupiter-mass companion" (木星質量の伴星) という呼び方をされています。
観測に用いられたのは、フランスのオート=プロヴァンス天文台 (Observatoire de Haute-Provence) にある口径 1.93 m の望遠鏡で、これに高分散分光器を設置して観測が行われました。
視線速度の振幅から求めたペガスス座51番星b の最小質量は 0.47 木星質量と、褐色矮星の下限質量を大きく下回る値となっています。
こちらもやはり軌道面の角度の値 \(i\) は不明なため、真の質量も不明です。
しかし (地球から見た時の) 軌道面の角度がランダムに分布していると仮定すると、この天体の真の質量が 4 木星質量を超える可能性は 1% 程度、褐色矮星の下限質量である 13 木星質量を超える可能性はわずか 4 万分の 1、0.0025% となり、褐色矮星である可能性を高確率で排除出来ます。
また、中心星のペガスス座51番星からの光の観測から、ペガスス座51番星の自転軸の角度と自転速度はある程度の見積もりがなされています。
ペガスス座51番星の赤道面とペガスス座51番星b の公転面が揃っていると仮定すると、真の質量の推定値は 1.2 木星質量程度、大きめのずれを考慮した場合でも 2 木星質量以下となり、褐色矮星である可能性はほぼ排除出来ます。
1995 年の発見報告後しばらくは惑星の存在を疑う声もあり、例として David F. Gray は 1997 年 2 月に、ペガスス座51番星の視線速度の観測結果を解析して惑星の存在に否定的な論文を発表しています。
Gray の主張は、視線速度の変動は惑星によるものではなく、これまでに知られていなかった恒星表面の脈動現象によるものだというものです。
しかし翌年の 1998 年 1 月には、Gray はこの自らの主張を否定する論文を発表しました。
さらなる観測をして解析をした結果、ペガスス座51番星の視線速度変動を説明するためには惑星が存在していると考えるのが最も良い、としています。
一般的には、ペガスス座51番星b の発見をもって、太陽系外惑星の初発見例とする場合が非常に多いです。
当然ながら、視線速度法を用いた系外惑星の初めての発見例でもあります。
しかし、パルサー周りの惑星質量天体はこれ以前の 1992 年に発見されており、こちらを太陽系外惑星の初発見とみなす場合もあります。
そのため、より正確な表現としてはペガスス座51番星b は主系列星周りを公転する太陽系外惑星の初発見例という事になります。
ペガスス座51番星b は、軌道長半径が 0.05 AU と極めて恒星に近い所を公転しています。
その質量から巨大ガス惑星である可能性が高く、中心星に非常に近い所を公転している巨大ガス惑星、いわゆるホットジュピター (hot Jupiter) の代表例です。
先述のように、中心星に近く、かつ質量の大きい惑星の場合は視線速度変動が大きくなり、ペガスス座51番星b による中心星の視線速度の振幅は 70 m/s と大きな値を示します。
ペガスス座51番星b の発見までは、巨大ガス惑星は太陽系における木星のように、中心星からある程度距離のある場所を公転しているものだと考えられて来ました。
そのため、中心星に極めて近い場所を公転するこの惑星の発見は、大きな驚きをもたらすこととなりました。
それまでの視線速度法の観測精度を考えると、ペガスス座51番星b よりも前に系外惑星を発見出来ていてもおかしくはありませんでしたが、巨大ガス惑星は中心星から遠く周期が長いものばかりだと考えられていたため、このような中心星に近く短周期の惑星は見逃されて来ました。
惑星が長周期であれば変化の周期が長いため観測は頻繁でなくても良いですが、短周期の場合は観測の間隔を空けると変動に気付かない場合があります。
木星程度の惑星による変動 (13 m/s 程度) を検出出来るだけの観測精度は、ガスセル法の開発によって既に 1980 年代には実現できていましたが (10 m/s 程度)、ガス惑星の軌道に対する先入観とそれによる観測間隔などの影響で、初発見は 1995 年まで待たなければなりませんでした。
これまでの惑星系に対する先入観を覆すことになったペガスス座51番星b の発見以降は、似たようなホットジュピターが次々と検出され、さらに過去の観測データからも、見逃されていた惑星による視線速度の変動がいくつも発見されました。
木星サイズよりも一回り小さく、海王星程度の質量だと推定される惑星が中心星の近くを回っている場合は、ホットネプチューン (hot Neptune) と呼ぶ事があります。
視線速度法での観測では、大きな望遠鏡で光を集め、高分散分光器で分光する必要があるため、一般に大型の望遠鏡を用いた観測が必要です。
そのため、地上の大型望遠鏡に分光観測のための装置を取り付けて観測する事がほとんどです。
視線速度法を用いた観測を行っている代表例には、チリのラ・シヤ天文台 (La Silla Observatory) の 3.6 m 望遠鏡に設置されている、HARPS (High Accuracy Radial Velocity Planet Searcher) があります。
日本語だと「高精度視線速度系外惑星探査装置」となります。
最も高精度の視線速度観測を行える装置のうちの一つで、同時比較光源光取得法を用いた最高精度の観測を達成したのも HARPS です (2018年5月現在)。
その他、アングロ・オーストラリアン天文台 (Australian Astronomical Observatory) や、ペガスス座51番星b の発見につながる観測が行われたオート=プロヴァンス天文台など、あちこちの天文台の望遠鏡で視線速度法による惑星の探査が行われています。
視線速度法での観測は、比較的明るい恒星の可視光での高分散分光観測が主流でした。
最近では赤外線領域の高分散分光観測の技術も発達していて、可視光では暗いものの赤外線領域で比較的明るい M 型主系列星での視線速度観測も進んでいます。
視線速度法は間接的な系外惑星発見法であり、直接観測しているのはあくまで恒星からの光 (のスペクトルの変動) です。
そのため観測される光そのものには惑星の情報は含まれておらず、スペクトルの変動から惑星の情報を取り出すことになります。
(光に惑星の情報が全く含まれていないとは言い切れませんが、この話の範囲内では無視出来ます)
視線速度の変動はそのまま惑星の公転周期に対応しているため、変動の曲線からは惑星の公転周期が得られます。
中心星の質量が分かっているとすると、中心星の質量と惑星の公転周期から、惑星の軌道長半径も決定出来ます。
恒星の質量と光度には結びつきがあり (質量光度関係)、多くの場合観測から恒星質量が分かる場合が多いため、視線速度法での観測からは惑星の軌道長半径までは精度よく決定出来ます。
また、上に示した図のように、軌道離心率が大きいと視線速度の変動がサインカーブからずれますが、このずれ具合から惑星の軌道離心率を決める事も出来ます。
太陽系の惑星は軌道離心率は小さいですが、系外惑星の中には離心率が大きく、1 に近い細長い楕円軌道を持つ惑星があることも分かっています。
このような高軌道離心率を持つ惑星の事を、俗にエキセントリック・プラネット (eccentric planet) と呼びます。
明確な基準はありませんが、離心率が 0.1 を超えるものを指してこう呼ぶ事が多いです。
また、視線速度変動の振幅は
\begin{align*}
K\simeq\frac{1}{\sqrt{1-e^{2}}}\left(\frac{2\pi G}{P}\right)^{1/3}\frac{m\sin i}{\left(\Mstar+m\right)^{2/3}}
\end{align*}
で与えられますが、ここから \(m\sin i\) は比較的高精度で決定出来ます。
しかし先述の通り、軌道面に垂直な線と視線方向が成す角 \(i\) は、ほとんどの場合不明です。
そのためここから分かるのは惑星の最小質量 (minimum mass)である \(m\sin i\) となります。
惑星の真の質量 (true mass) は、観測から得られる最小質量を \(\sin i\) で割ったものとなります。
特殊な状況でない限り \(\sin i\) の値は分かりませんが、確率的な議論から平均値を計算する事は可能です。
軌道面の向きがランダムであると仮定して、\(\sin i\) の平均値を計算すると
\begin{align*}
\langle\sin i\rangle=\frac{\int_{0}^{2\pi}\int_{0}^{2\pi}\sin i\sin i\,di\,d\phi}{4\pi}=\frac{\pi}{4}
\end{align*}
となります。
軌道面の向きが地球に対して特定の方向を向いているものが多いという事は考えにくいため、ランダムであるとする方が自然です。
この見積もりから分かる事は、\(\sin i\) の平均的な値は \(\pi/4\)であるため、平均的には真の質量は最小質量の 1.273 倍だと見積もる事が出来ます。
そのため、最小質量が巨大ガス惑星と褐色矮星の境界に近いものは惑星であるかは非常に怪しいですが、最小質量が境界値よりもはっきりと低い場合は真の質量は惑星の範囲内に収まる可能性が高いことになります。
これはあくまで平均の話であり、視線速度法で発見されたある特定の惑星の質量を決める事は出来ませんが、多くの惑星について統計的な議論をする場合は、\(\sin i\) による不定性はあまり影響を及ぼしません。
惑星の質量の範囲は桁で変わるため、多数の惑星の統計的な議論の中では 1.273 倍の不定性は無視出来る程度だからです。
太陽系には 8 つの惑星がありますが、系外惑星系でも複数の惑星が発見されている多重惑星系 (multiple planet system) が発見されています。
「複数惑星系」という表現も見られます。
また英語では "multiplanetary system" という表現もあります。
惑星が複数ある場合は中心星の視線速度の変動は複数の惑星の運動によるものになるため複雑になります。
惑星質量が大きく、中心星に近いものによる振幅が大きくなるため、重く中心星に近い惑星による変動が視線速度変動の中で最も支配的になります。
この惑星の影響による変動を取り除いた後の残差にまだ別の周期の視線速度の変動が残っている場合は、2 つ目以降の惑星の存在が示唆されます。
一番大きな変動を取り除いた中の変動を解析し、それによって見つかった 2 つ目の惑星による変動を取り除き...という順に解析を行うことで、多重惑星系を発見することができます。
一番影響の大きな惑星による変動を取り除いた後は、概して誤差が大きくなります。
視線速度変動の見た目だけではほとんど判別出来ず、統計的な手法を用いて辛うじて惑星によるシグナルを見出しているような例も多くあります。
そのため、多重惑星系での小さい惑星については誤差が大きく、また誤検出であったという場合もあります。
視線速度観測のための技術
視線速度法のターゲット
中心星による検出しやすさ
軌道による検出しやすさ
視線速度法による発見
ケフェウス座ガンマ星b (撤回のち再発見)
HD 114762 b (褐色矮星?)
ペガスス座51番星b
ペガスス座51番星b 発見以後
視線速度法による観測
主な観測
視線速度法で分かる事
多重惑星系
| 検出に有利 | 中心星に近い軌道を持つ (視線速度変動が大きくなり、周期も短いため) |
| 惑星質量が大きい (同上) | |
| 検出に不利 | 中心星から離れた軌道を持つ (視線速度変動が小さくなり、周期も長いため) |
| 惑星質量が小さい (同上) | |
| 中心星が暗い (高分散分光が困難なため) | |
| 中心星が若く高温 (吸収線に乏しいため) | |
| 中心星が若く自転が高速 (吸収線が広がってしまうため) | |
| 得られる情報 | 惑星の公転周期・軌道長半径 |
| 惑星の軌道離心率 | |
| 惑星の最小質量 | |
| その他 | 惑星を持っていた場合の検出確率は高い |
| 真の質量は一般には決定不可 |
視線速度法による誤検出
観測を行う以上付きまとうのが、誤検出の可能性です。 単純に装置の影響による誤検出以外にも、あたかも惑星による変動のように見えてしまう現象はいくつもあり、これが惑星の誤検出の原因となります。
視線速度の観測に一番影響を与え得るのが、恒星の表面現象です。 例えば太陽の場合は、5 分程度の周期を持つ 「5 分振動」と呼ばれる小さな変動を起こしています。 他の恒星でも、5 分から 10 分程度の周期を持つ変動が起きている場合があり、この変動による視線速度変化の振幅は数m/s であるため、地球程度の惑星による視線速度変化の 10 cm/s より有意に大きいです。 これは精度を悪くする原因となりますが、この周期は惑星の周期よりは明らかに短いため、惑星検出に関しては影響を及ぼさず、また観測の際の露出時間をこの振動の周期より長くすることによって平均化する事が可能です。
そのほかにも、恒星表面での黒点などの移動による影響が生じる事があります。 恒星表面に黒点や白斑などが存在していた場合、恒星の自転によってその見え方が変化するため、惑星によるシグナルと恒星の自転を混同する可能性があります。 多くの場合、視線速度測定以外の方法で恒星の活動度を測定することで、恒星の自転に由来する変動と惑星によるシグナルを切り分けるといった事が行われています。
恒星の長期変動の影響も誤検出に繋がります。 例えば太陽の場合は約 11 年周期で黒点数が変動しています。 黒点の場所では強い磁場によって対流が抑制されてこちらに向かってくる成分が弱くなるため、黒点数が多い場合は少ない場合に比べて相対的に赤方偏移して見えます。 これが原因で、太陽の見かけの視線速度は、太陽活動の 11 年周期と強い相関があることが分かっています。 これは、太陽を遠方から視線速度法で観測した場合、11 年周期の視線速度変化を惑星によるシグナルだと誤認する可能性があるという事です。 (実際には木星の公転周期である 11.86 年周期での視線速度変化が卓越するため、あくまで誤認可能性の一例です)。 このような恒星の長期変動を惑星による変動と誤認する可能性があります。
太陽系に一番近い惑星であるケンタウルス座アルファ星Bb は視線速度法によって発見されましたが、主星のケンタウルス座アルファ星B も恒星活動に起因する変動があります。
この変動を取り除いて解析した結果から、地球型惑星が存在するという事が判明しています。
しかし、変動の取り除き方を変えると惑星によるシグナルが弱くなってしまう事から、惑星の存在を疑問視する声もあります。
(2014 年 12 月時点では既に存在が確定したとしてカタログにも掲載されていますが、今後の観測で変わる可能性もあるということです)。
(※2016 年 12 月追記)
このように存在に疑義が示されていたケンタウルス座アルファ星Bb ですが,2015 年になって新しい解析と検証がされた結果、惑星由来のシグナルではない「誤検出」であったという事が示されました。
現在ではケンタウルス座アルファ星Bb は存在しないとみなされ、各種系外惑星のカタログからも外されています。
さらには、観測に用いる CCD の設計の特性により、地球の公転周期やその倍音成分に近いシグナルを誤検出するという例が知られています。
これは、恒星からのスペクトル線が地球の公転に伴う変動によって CCD の繋ぎ目をまたぐ際に発生することがあります。
この影響による、本来存在しないはずの見かけの視線速度の変化は数m/s 程度になる場合があり、惑星によるシグナルと誤認しやすくなります。
また、誤検出だった可能性が非常に高い例として、グリーゼ581 まわりのいくつかの惑星が挙げられます。
実視等級 10.55 の M 型主系列星であるグリーゼ581 の周りには、視線速度法を用いてグリーゼ581b, c, d, e, f, g の合計 6 つの惑星が 2005 年から 2010 年にかけて "発見" されていました。
特に 2010 年 9 月に "発見" が公表されたグリーゼ581g は、水が液体で存在出来るハビタブルゾーン内を公転しているとされ、また推定質量から地球型惑星である可能性が高かったため、生命が存在する可能性がある系外惑星の代表例として話題となりました。
しかし、グリーゼ581b, c, e による変動を取り除いた後に残る視線速度の変動が、中心星の彩層に起因する Hα 線の変動と非常に強い相関があることから、これは惑星によるものでは無く恒星の表面活動によるものでは無いかという指摘がなされました。
実際、恒星の表面活動による影響を補正して再解析を行った結果、グリーゼ581d, g, f によるシグナルは消失してしまったことが分かっていて、これら 3 惑星は恒星の表面活動を惑星によるシグナルと誤認した結果だと考えられています。
現在 (2014 年 8 月現在) では、系外惑星のカタログからはグリーゼ581d, g, f は削除されています (b, c, e はそのまま掲載されています)。
2010 年に発見が報告され、ハビタブルゾーン内にあって生命の存在可能性がある最有力候補とまでされたグリーゼ581g ですが、発見から 4 年あまりでその存在が "消滅" してしまうということになりました。
なおグリーゼ581g とグリーゼ581f については、発見直後の段階で既に存在を疑う意見が出されていて (Anglada-Escude 2010 など)、2011 年以降は存在は未確定とされていました。
2014 年になってグリーゼ581d が恒星の活動による可能性が高いと判明し (Robertson et al. (2014))、グリーゼ581g もそれに伴う誤検出だとの認識が主流です。
アストロメトリ法 (astrometry)は、惑星の公転運動によって恒星がわずかに揺れ動く現象を、視線速度ではなく恒星の位置のずれから直接観測する手法で、間接法の一種です。
「位置天文学」や「高精度位置観測」などと呼ばれることもあります。
位置天文学自体は古くからある分野で、天体の位置や運動を扱う学問です。
恒星の位置の動きから見えない伴星の存在を同定するという観測は系外惑星の検出に限らず行われていて、この手法で発見される連星は位置天文学的連星 (astrometric binaries) と呼ばれます。
この方法で発見される不可視の伴星は、中性子星などの可視光をほとんど発しない天体である場合が多いです。
恒星の運動から間接的に惑星の存在を知るという点では、視線速度法と同じ思想を持ちます。
視線速度法が恒星からの光の高分散分光観測を必要とするのに対し、こちらは恒星の位置の変化を直接測定すれば良いため分光観測は必要ありません。
そのかわり、惑星程度の軽い天体の検出のためには非常に高い位置決定精度が要求されます。
アストロメトリ法に関する物理を簡単に紹介します。
アストロメトリ法で観測するのは恒星の揺れ動く幅ですが、観測する際に天球面上でどれだけの角度動いて見えるのかが重要です。
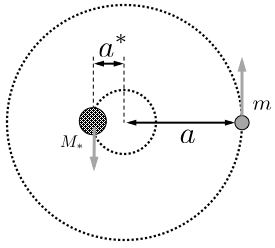
模式図は以下のようになります。
左側が惑星と恒星の動きを描いたものです。
恒星の動きは実際にはもっと小さいですが誇張して書いてあるため、縮尺は正しくありません。
恒星の動きの振幅は、恒星の軌道長半径 \(a^{\ast}\) となります。
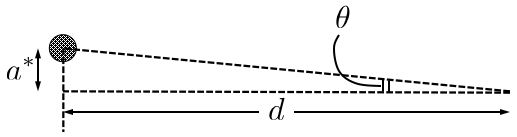
恒星の動きの振幅が、離れた位置からどれだけの角度変化で見えるのかを示したのが右側の図です。
右端が観測者です。
距離 \(d\) だけ離れた位置から、長さ \(a^{\ast}\) を見込む角度 \(\theta\) が分かれば良いことになります。
なおこの図では軌道面と視線方向が垂直の状態を描いていますが、軌道面と視線方向の成す角が何度であっても位置の振幅自体は同じ \(a^{\ast}\) になります。
つまり、軌道面と視線方向が垂直であれば恒星の動きは半径 \(a^{\ast}\) の円運動に見えますし、軌道面と視線方向が平行であれば、円運動を真横から見ていることになるため振幅 \(a^{\ast}\) の振動をして見えます。
また、角度が斜めであれば、円運動を斜めから見ていることになるため恒星は楕円運動をしているように見えますが、どのような角度の場合も恒星の位置の変化は \(a^{\ast}\) となります。
位置変化の振幅が、軌道面と視線方向の角度に関わらず一定であることがアストロメトリ法の特徴です。
位置変化の振幅の依存性を見て行きます。
右側の図より、 \(\tan\theta=a^{\ast}/d\) である事が分かりますが、恒星の位置変化は地球と恒星との距離に比べると非常に小さいため、恒星の位置変化を見込む角度 \(\theta\) も非常に小さい値となります。
そのため、\(\tan\theta\approx\theta\) と近似する事が出来ます。
また、視線速度法の所でも出て来ましたが、
\begin{align*}
\frac{a}{a^{\ast}}=\frac{\Mstar}{m}
\end{align*}
という関係があるため、これらの関係から \(\theta\) は
\begin{align*}
\theta\simeq\frac{a^{\ast}}{d}=\frac{m}{\Mstar}\frac{a}{d}
\end{align*}
と書くことができます。
比較のために、中心星が太陽質量、惑星は木星質量、軌道長半径が 1 AU、恒星までの距離が 10 pc の場合の具体的な値を算出すると、
\begin{align*}
\theta\simeq5.0\times10^{-10}\left(\frac{m}{\MJ}\right)\left(\frac{\Mstar}{\Msun}\right)^{-1}\left(\frac{a}{1\,{\rm AU}}\right)\left(\frac{d}{10\,{\rm pc}}\right)^{-1}\,\left[{\rm rad}\right]
\end{align*}
となります。
単位はラジアン (rad) です。
角度は「秒」(時間の単位の秒と区別するため「秒角 (arcsec)」とする場合があります。1 度 = 3600 秒角) で表されることが多いため、秒角に直します。
\(1\,\left[{\rm rad}\right]=180^{\circ}/\pi=180\times3600/\pi\,\left[{\rm arcsec}\right]\) より、
\begin{align*}
\theta\simeq5.0\times10^{-4}\left(\frac{m}{\MJ}\right)\left(\frac{\Mstar}{\Msun}\right)^{-1}\left(\frac{a}{1\,{\rm AU}}\right)\left(\frac{d}{10\,{\rm pc}}\right)^{-1}\,\left[{\rm arcsec}\right]
\end{align*}
と表すことができます。
太陽程度の恒星の周りの 1 AU の場所にある木星質量の惑星を、10 pc 遠方から観測した場合は、恒星の位置の変動は 0.0001 秒角に見えるということが分かります。
1 秒角 (arcsec) の 1000 分の 1 を 1 ミリ秒角 (1 mas)、1 ミリ秒角のさらに 1000 分の 1 を 1 マイクロ秒角 (1 μas) と表記する事が多く、こちらを使うと 0.1 mas、あるいは 100 μas となります。
太陽系の木星の場合は軌道長半径が 5 AU なので、上の式に 5 AU を代入すると、木星による太陽の位置変化の振幅は 0.5 mas (0.5 ミリ秒角) 程度であることが分かります。
地球の場合は木星質量の 317.83 分の 1 を代入すると、0.3 μas と極めて小さな値になるため、仮に 10 pc の距離からアストロメトリで地球を検出する場合は非常に高い位置決定精度が必要になります。
式の形より、惑星質量が大きい方が位置変化の振幅は大きくなる事が分かります。
同様に恒星が軽い場合も振幅が大きくなるため、中心星と惑星の質量比が小さいほど検出しやすい事を意味します。
また、軌道長半径が大きい方が振幅は大きくなるため、検出しやすくなります。
軌道長半径が大きいと検出しづらくなる視線速度とは対照的です。
また、視線速度法では軌道面に垂直な方向と視線速度方向が成す角 \(i\) の不定性が残ったのに対し、アストロメトリ法ではこの角度 \(i\) も原理的には同時に測定する事が可能です。
そのため軌道を決定する事ができ、惑星の最小質量ではなく真の質量も決定出来るという非常に大きなメリットがあります。
メリットが非常に多いように思えるアストロメトリ法ですが、最大の難点は非常に高い精度の位置測定が必要であることです。
例えば、ESA の打ち上げた位置天文衛星ヒッパルコスでは、位置決定精度は 1 mas から 3 mas 程度です。
太陽系の木星の検出のためには 0.5 mas の振幅が検出出来る必要があるため、精度としては厳しいところです。
そのため、アストロメトリ法での惑星発見例は 2017 年 6 月時点ではごく僅かに留まっています。
先述のように、アストロメトリ法で最も重要なのは正確に位置を測定する事です。
非常に高い精度での位置決定が必要ですが、直接撮像での問題点と同様に、地上からの観測では大気の揺らぎの影響で高精度の位置決定が困難になります。
そのため、同じく補償光学を使って大気の揺らぎの影響を出来る限り低減するなどの努力が重ねられていますが、それでもやはり検出のハードルは高いです。
宇宙空間では大気の影響は受けないため条件は良くなります。
しかしそれでも観測精度は高いものが要求されます。
現在、ヒッパルコス衛星の後継である、最新鋭の位置天文探査機ガイア (Gaia) が 2013 年 12 月に打ち上げられていて、この探査機による高精度の位置決定が期待されています。
ガイアは 2014 年 7 月 5 日から科学観測を開始し、2016 年 9 月 14 日に最初のデータ公開 (Gaia Data Release 1, 略称 DR1) を行いました。
今後もさらに長期間に渡るデータの公開が行われ、アストロメトリ法による惑星の検出や、これまでに発見されている惑星の軌道要素の決定などが行われることが期待されています。
現在のところアストロメトリ法による大規模な系外惑星探査は行われていないため、特にターゲットとなる天体があるわけではありませんが、アストロメトリ法の特性上検出しやすい状況としづらい状況があります。
既に紹介した通り、惑星が比較的重く、恒星が比較的軽い場合はアストロメトリ法での検出に有利になります。
また、軌道長半径が大きい方が同じくアストロメトリ法には有利です。
分光観測が必要ではないため、視線速度法に比べると暗い恒星にも適用する事が可能です。
同様に、吸収線が少ない高温の恒星や、吸収線が広がっている若く自転が速い恒星も観測する事が出来ます。
さらに、恒星の表面活動が活発な場合でも、位置だけを見ていれば良いためアストロメトリ法ではほとんど影響しません。
逆に、惑星質量が軽く、中心星の質量が重い場合は感度が悪くなることになります。
また、軌道長半径が小さいと振幅が小さくなるため、短周期の惑星の検出は苦手です。
地球からの距離に反比例して振幅が小さくなるため、地球からの距離が離れている場合は明るい恒星であってもアストロメトリ法での検出は難しくなります。
これらをまとめると、アストロメトリ法では地球に比較的近い系で、軌道長半径が大きな惑星を持つ系に対して感度が高いと言うことができます。
視線速度法とは違い、中心星のタイプにはあまり依存しません。
ただし、アストロメトリ法も視線速度法と同様に、検出のためには公転周期と同程度の観測期間が必要とされます。
アストロメトリ法はもともと軌道長半径が大きく周期が長い惑星向きであるため、観測の間隔を長くとったとしてもそこまで問題ではないとは言えます。
既に紹介した通り、アストロメトリ法で惑星を発見するためにはかなり高精度の観測が必要不可欠です。
しかし、アストロメトリ法の概念自体は遥か昔から存在し、"見えない天体の発見手法" としては最も古典的な手法とも言われています。
そのため、かなり昔からアストロメトリ法を用いた系外惑星の観測の試みは行われて来ましたが、観測精度が良くなかったため挫折の連続でした。
数々の発見報告が続き、それらが全て否定されて来たため、アストロメトリ法による惑星の検出は完全に下火となってしまいました。
史上初めてアストロメトリ法で系外惑星を発見したという主張がされた対象、おそらくへびつかい座70番星 (70 Ophiuchi) です。
Capt. W. S. Jacob が、現在のインド・チェンナイにあった Madras Observatory (マドラスはチェンナイの当時の名称) でへびつかい座70番星を観測した結果、この恒星を公転する惑星を発見したと報告しました。
これはなんと 1855 年 6 月のことです。
発見を報告する論文の中で、Jacob は "planetary body" という単語を使用しています。
Jacob の発見報告と同様の報告は、Thomas Jefferson Jackson See によって 1896 年 1 月にもなされています。
へびつかい座70番星は、18 世紀後半にはウィリアム・ハーシェルが行った連星についての研究により、既に連星である事が判明していました。
このときハーシェルは連星の運動を解析し、へびつかい座70番星系には不可視の 3 体目の天体が存在する可能性があるとの指摘をしていました。
そのため Jacob や See による惑星の発見報告は、ハーシェルの指摘を裏付けるものだと考えられました。
しかしその後 Forest Ray Moulton によって、観測から得られた惑星の軌道では系は短時間で不安定になってしまうため、存在することは出来ないという指摘が 1899 年 5 月にされています。
Moulton は当時 See の元で研究をしていた大学院生で、制限三体問題をもとにして See の結果から得られた軌道は非常に不安定であることを示しました。
Moulton は、かつての See の学生であり、See の論文での軌道計算を行った人物である Eric Doolittle にこの件を指摘しました。
また Doolittle 自身も、見えない 3 体目の存在を仮定しなくてもへびつかい座70番星の軌道を説明出来るという指摘を 1897 年 4 月に行っています。
現在では、Jacob や See によってなされた "発見" は、間違いであったと考えられています。
1943 年 1 月には、Dirk Reuyl と Erik Holberg によって、再び 3 体目の天体を発見したという報告がなされました。
彼らの観測とその解析結果によると、3 体目の質量は太陽質量の 0.008 倍から 0.012 倍程度との事で、これは褐色矮星の質量下限値よりも低い値です。
この結果は反響を呼びましたが、こちらも後の観測によって否定されています。
2006 年になってへびつかい座70番星まわりの惑星の探査が行われましたが、惑星が存在する証拠は発見されていません。
バーナード星 (Barnard's Star) は、ケンタウルス座アルファ星系に次いで太陽系に近い恒星 (5.98光年) で、M 型主系列星 (赤色矮星) です。
1963 年 9 月に、Peter van de Kamp がアストロメトリ法を用いて惑星を発見したという報告をしました。
van de Kamp の初めの報告では、惑星の質量は 1.6 木星質量程度とされていました。
後にこの値は何度か van de Kamp 自身によって修正され、1969 年の報告では 1.1 木星質量と 0.8 木星質量の 2 つが存在するとされていました。
1963 年の発見報告以降、バーナード星に惑星があるということは 10 年近くの間信じられていましたが、1973 年に状況が大きく変わります。
1973 年 9 月に、John L. Hershey によって、アストロメトリ法で検出されたと言われる恒星の運動は、観測機器の誤差に起因する可能性があるという事が指摘されました。
また、直後の 1973 年 10 月には、George Gatewood と Heinrich Eichhorn が、バーナード星の周囲に惑星は存在しないとする観測結果を報告しました。
これらの研究結果により、バーナード星まわりの惑星は誤検出であったと考えられるようになりました。
1990 年代にも、ハッブル宇宙望遠鏡を用いてバーナード星の観測が行われていますが、惑星が存在する証拠は発見されませんでした。
これらの観測では惑星の可能性が完全に排除されたわけではありませんが、少なくとも van de Kamp が存在を主張していた質量の惑星は存在し得ないということが分かっています。
van de Kamp によるバーナード星でのの "発見報告" に先立つ 1951 年 4 月、van de Kamp とその教え子の Sarah Lippincott によって、ラランド21185 (Lalande 21185) という M 型主系列星の周りに、アストロメトリ法によって惑星を発見したという報告がなされました。
ラランド21185 は地球からの距離が 8.31 光年で、星系としては (連星は1つとカウントすれば) 6 番目に近い天体です。
1960 年にも Lippincott によって同様の報告がされ、この時は観測によって得られた "惑星" のパラメータが少し修正されました。
しかしこの発見報告も、同じくバーナード星周りの惑星の存在を否定した Gatewood によって 1974 年 1 月に一度否定されています。
それから約 23 年後の 1996 年に、かつてラランド21185 周りの惑星検出を否定した Gatewood が、アストロメトリ法を用いて惑星を発見したと主張しました。
Gatewood は 1996 年のアメリカ天文学会の会合で、軌道周期 5.8 年、質量が 0.9 木星質量の惑星を検出したと発表し、また軌道周期が 30 年程度の 2 つ目の惑星が存在する可能性についても言及しました。
同様の内容は大衆紙であるニューヨーク・タイムズにも 1996 年 6 月 12 日に掲載され (記事のアーカイブ)、話題となりました。
Gatewood は 1970 年代にバーナード星やラランド21185 の観測を行い、van de Kamp らの発見報告を否定した後も、アストロメトリ法による惑星の観測についての研究を継続していました。
過去 50 年に渡る期間に得られた写真を解析し、また別の観測機器を用いて 8 年近く追観測を行い、ついにラランド21185 まわりの惑星 "発見" の報告に至りました。
しかしこの発見報告も、その後の数々の追観測では惑星が存在する証拠が得られなかったことや、ラランド21185 の視線速度法での観測からも検出が出来なかった事から、発見報告の正確性には疑いが持たれています。
バーナード星の場合と同様に検出限界以下の惑星が存在する可能性を完全に否定する事は出来ませんが、Gatewood による発見報告も間違いだったと考えられています。
かつて van de Kamp らの発見報告を否定した Gatewood は、23 年の時を経て今度は自身の発見報告を否定されるという逆の立場となりました。
ここまでで分かる通り、いくつもの恒星でアストロメトリ法による惑星の発見報告がありましたが、後に否定されるという事がしばらく続きました。
van de Kamp やその共同研究者達も、バーナード星やラランド21185、はくちょう座61番星など多くの星を観測し、アストロメトリ法での惑星の発見報告を行いましたが、それらは現在までに全て否定されています。
van de Kamp は、1995 年 10 月のペガスス座51番星b の発見を知ること無く、1995 年 5 月に 93 歳で亡くなりました。
数多くの観測の報告と否定が続き、アストロメトリ法は系外惑星の検出手段としては下火となってしまいました。
そのため、アストロメトリ法にとってポジティブな話題は、観測機器の発達する 2000 年代まで待たなければなりませんでした。
グリーゼ876 は、15.3 光年の距離にある M 型主系列星 (赤色矮星) です。
1998 年に、視線速度法を用いてグリーゼ876b, c の 2 つの惑星が発見されました。
その後、2002 年にハッブル宇宙望遠鏡によってグリーゼ876 を詳細に観測した結果、グリーゼ876b, c の公転による中心星の位置の変動を検出することに成功しました。
これが、アストロメトリ法で確実に恒星の動きを捉えることができた最初の例です。
惑星自体は既に視線速度法を用いて発見されていたため、この検出例はアストロメトリ法による系外惑星の初発見ではありません。
しかし、アストロメトリ法による観測からグリーゼ876b, c の軌道要素が決まり、視線速度法では分からなかった真の質量を求めることに成功しています。
グリーゼ876b, c の両惑星は、アストロメトリ法を用いて軌道要素や質量などのパラメータが求められた初めての系外惑星でもあります。
おそらくこれが、アストロメトリ法にとって初めての前向きなニュースです。
グリーゼ876 で恒星の位置の動きの検出に成功した後も、アストロメトリ法での惑星の発見例はしばらくありませんでした。
2009 年には VB10 という赤色矮星まわりにアストロメトリ法を用いて惑星を発見したという報告がありましたが、視線速度法での追観測では惑星が存在する証拠は得られず、数々の発見例が棄却されて来た過去の例と同様にこの観測結果も否定的に見られています。
信頼性が高い初めての発見例は、2010 年に発見が報告された HD 176051b です。
パロマー天文台の望遠鏡の Palomar High-precision Astrometric Search for Exoplanet Systems (PHASES) を用いて 51 個の連星系を観測し、連星の位置の変化を詳細に追うという観測が行われました。
その結果、HD 176051A, B の連星の動きから、惑星質量の 3 体目が "高い確率で" 存在するということが判明しました。
これが、アストロメトリ法での系外惑星の初発見例と見なされています。
HD 176051 は連星になっていますが、HD 176951 が連星のどちらを公転しているのかははっきりしていません。
HD 1760551A を公転しているのであれば惑星質量は 2.26 木星質量、HD 1760551B を公転しているのであれば 1.5 木星質量だと見積もられています。
アストロメトリ法の長い歴史の中では、数多くの望遠鏡が観測に用いられて来ました。
しかし惑星による恒星の位置変化は極めて小さいため高精度の観測が必要で、大気の影響も検出を困難にします。
そのため、検出のための数多くの努力がなされたにも関わらず、過去の観測のほぼ全ては失敗に終わりました。
補償光学を含む最新の技術を持ってしてもアストロメトリ法での検出は非常に困難でしたが、2010 年に初めて成功しています。
地上からの観測を行う場合は、高精度の機器の較正や大気の影響を取り除く技術が必要となります。
宇宙空間からのアストロメトリ法による観測は有望視されています。
太陽系の木星の場合は、10 pc 離れた位置からの太陽の位置変動は 0.5 mas 程度に見えます。
位置天文衛星ヒッパルコスは精度が 1 - 3 mas 程度だったため 0.5 mas の位置変化の検出は困難ですが、2013 年 12 月に打ち上げられた最新の位置天文探査機 ガイア (Gaia) の場合は精度が 5 - 20 μas であるため、太陽を周回する木星程度の惑星であれば発見することが可能です。
ガイアは元々は "Global Astrometric Interferometer for Astrophysics (GAIA)" から来ており、この名称は当初は干渉計 (interferometer) を用いた観測を予定していた事にちなんでいます。
後に計画が変更されたためこの名称自体は意味を成さなくなりましたが、機器の名称としては引き続き使用されています。
ガイアは地球と太陽のラグランジュ点 L2 まわりのリサージュ軌道上で運用されています。
これは、太陽から見て地球の反対側に位置する点で、太陽・地球・探査機の位置関係をほぼ保ったまま太陽の周りを公転する軌道です。
(つまりガイアは地球の周りを公転する軌道にいるわけではないため、正確には人工衛星ではありません。)
かつては、"Space Interferometry Mission (SIM)" という、アストロメトリ法のための初めての干渉計を搭載した NASA による人工衛星の計画がありました (地球の後を追う軌道が想定されていたため、正確にはこちらも人工衛星ではなく宇宙機)。
SIM の精度は 1 - 4 μas 程度が想定されていて、これは条件次第では地球クラスの惑星も検出可能な精度に相当します。
2010 年代の打ち上げが予定されていましたが、2010 年に計画自体がキャンセルとなりました。
アストロメトリ法も視線速度と同様に、惑星の公転に伴う恒星の運動を観測する手法です。
そのため、位置変動の周期から惑星の公転周期が判明します。
同様に中心星の質量が分かっている場合は、惑星の軌道長半径も求める事が出来ます。
軌道離心率も得る事が出来ます。
アストロメトリ法の最大の特徴は、視線速度法では分からなかった、惑星の軌道面に垂直な方向と視線方向の角度 \(i\) を直接観測出来るという点です。
視線速度法では角度が分からないため \(\sin i\) の不定性が残り、惑星の最小質量しか得ることができませんでしたが、アストロメトリ法の場合は惑星の真の質量を知ることができます。
\begin{align*}
\theta\simeq\frac{a^{\ast}}{d}=\frac{m}{\Mstar}\frac{a}{d}
\end{align*}
の式から分かるように、真の質量 \(m\) を求めるためには、惑星の軌道長半径、中心星の質量、系までの距離と、中心星の位置変動の角度 \(\theta\) が必要です。
\(\theta\) はアストロメトリ法で直接観測する量であり、恒星質量は質量光度関係などから別途求めておくものとします。
軌道長半径は軌道周期と恒星質量から計算可能です。
また、距離は年周視差などの別の観測から求めることができます。
視線速度法の観測と組み合わせる事が出来れば、視線速度法では分からない惑星の真の質量を求めたり、視線速度法での精度良いパラメータを用いたりと、相補的に観測する事が可能になります。
また、視線速度法が苦手とする遠方の惑星をアストロメトリ法は得意としていて、逆もしかりです。
この点でも、アストロメトリ法と視線速度法は相補的であり、視線速度法などでは観測しづらいパラメータの惑星の発見に関してアストロメトリ法は重要だと考えられています。
グリーゼ581 での誤検出
アストロメトリ法
アストロメトリ法の物理
アストロメトリ法の概略図アストロメトリ法のための技術
アストロメトリ法のターゲット
アストロメトリ法による発見
へびつかい座70番星 (誤検出)
バーナード星 (誤検出)
ラランド21185 (誤検出)
グリーゼ876b, c
HD 176051b
アストロメトリ法による観測
主な観測
アストロメトリ法で分かる事
| 検出に有利 | 中心星から離れた軌道を持つ (位置変化が大きいため) |
| 惑星質量が大きい (同上) | |
| 検出に不利 | 中心星に近い軌道を持つ (位置変化が小さいため) |
| 惑星質量が小さい (同上) | |
| 系までの距離が遠い (同上) | |
| 得られる情報 | 惑星の公転周期 |
| 軌道長半径・離心率を含む軌道要素 | |
| 惑星の真の質量 | |
| その他 | 中心星が活動的でも検出可能 |
| 高温星や高速自転星でも検出可能 | |
| 惑星を持っていた場合の検出確率は (原理的には) 高い | |
| 極めて高精度の観測が必要 |
トランジット法
トランジット法 (transit)は、惑星が恒星の手前を通過する際に恒星の一部を隠すことによって起きるわずかな減光を捉え、惑星を検出するための手法です。 惑星による中心星の「食」を観測する現象であるため「食検出法」と呼ばれることもあります。これも間接法の一種です。
惑星が恒星の周りを公転していて、なおかつ地球から見た時に惑星が恒星の手前を通過して見えるような位置関係にある場合は、惑星の公転周期に応じて周期的に食が発生します。 食が起きている最中は惑星によって恒星からの光の一部が遮られるため、その分だけ恒星からの光が減少することになります。 恒星からやってくる光の微小な変動を観測し、恒星の光度をプロットした光度曲線 (light curve) を描いてやると、惑星に関する様々な物理量を知ることができます。
近年トランジット法を用いた発見個数は大幅に増加していて、惑星の軌道以外にも様々な情報を得られる場合もあるため非常に活発な分野になっています。
トランジット法の物理
トランジット深さ
トランジット法で観測するのは、中心星の周期的な減光です。 減光の大きさがどの程度なのかという事は、惑星の大きさがどの程度なのかという事と関係します。 トランジットしている時の減光率 \(\Delta L/L\) は、恒星の断面積と惑星の断面積から次のように概算出来ます。 \begin{align*} \frac{\Delta L}{L}&\simeq\left(\frac{\Rp}{\Rstar}\right)^{2}\\ &=0.01055\left(\frac{\Rp}{\RJ}\right)^{2}\left(\frac{\Rstar}{\Rsun}\right)^{-2}\\ &\simeq1.1\left(\frac{\Rp}{\RJ}\right)^{2}\left(\frac{\Rstar}{\Rsun}\right)^{-2}\,\% \end{align*} 最後の式は、太陽半径と木星半径で規格化して百分率で表した式です。 \(\Rsun\) は太陽半径、\(\Rstar\) は恒星半径、\(\RJ\) は木星半径、\(\Rp\) は惑星半径です。 この式から、木星半径の惑星がトランジットしている時は、中心星からの光は 1% ほど減少する事が分かります。 そのため、1% 以下の精度で光度変化を捉えることができる装置があれば、原理的には木星のトランジットを検出する事が可能です。
惑星半径を地球半径で規格化した場合は、 \begin{align*} \frac{\Delta L}{L}&\simeq\left(\frac{\Rp}{\Rstar}\right)^{2}\\ &=8.3978\times10^{-5}\left(\frac{\Rp}{\Re}\right)^{2}\left(\frac{\Rstar}{\Rsun}\right)^{-2}\\ &\simeq0.008\left(\frac{\Rp}{\Re}\right)^{2}\left(\frac{\Rstar}{\Rsun}\right)^{-2}\,\% \end{align*} となります。 \(\Re\) は地球半径です。 地球半径程度の場合は、減光率は 0.008% 程度と非常に小さくなります。 そのため、地球型惑星のような半径の小さい惑星を発見するためには、光度変化の測定に高い精度が要求されます。
これらの式から、トランジット時の減光率を測定すれば、中心星の半径と惑星の半径の比が求められることが分かります。 中心星の半径は別の観測から分かっているとすると、惑星の半径が決定出来ることになります。 視線速度法やアストロメトリ法など多くの観測方法では惑星半径に関する情報は得られませんでしたが、トランジット法では惑星半径が精度よく決定出来ます。 これはトランジット法の大きな特徴の一つです。 トランジットの光度曲線での減光の大きさは、トランジット深さ (transit depth) と呼ばれます。
トランジットの模式図

観測されたケプラー6 の光度曲線 (図は共にWikipedia.en より)
トランジットの模式図を見ると分かるように、惑星が恒星の手前を通過することによって恒星からの光が減少しています。 惑星が恒星の手前を通過することを、primary transit (または primary eclipse、一次食) と呼びます。
ケプラー6 の光度曲線を例に挙げます。 ケプラー6 の光度は、惑星 (ケプラー6b) が手前を通過するまではほぼ一定になっています。 恒星の端と惑星の端が重なり、惑星による食が始まるとケプラー6 からの光の一部が遮られるため光度は低くなり始めます。 食が始まった瞬間から、惑星が恒星面内に完全に入る瞬間までの時間の事を、ingress と呼びます。
その後は惑星が恒星面を通過している時間が続きます。 この期間は、惑星が動いても隠される面積は一定なので明るさは変化しないように思われますが (上の模式図では光度一定で描かれています)、ケプラー6 の光度曲線ではこの間も光度は変動を続けています。 これは、恒星の周辺減光 (limb darkening) が原因です。 周辺減光についての詳細は省きますが、恒星は見た目の中心部分よりも周辺部分のほうが暗く見えます。 そのため、恒星の端の暗い部分を隠している時と、恒星の中央付近の明るい部分を隠している時では、隠す面積は同じでも実質的に遮ることの出来る光量は変化することになります。 これが原因で、ingress が終わった後も徐々に暗くなり続け、惑星が最も恒星面の中心部分に近付いたときに光量は最小となり、惑星が端に近付くにつれて今度は徐々に明るくなります。 恒星の特性や観測する波長によって周辺減光の影響は異なるため、光度曲線の底の部分はほぼ平坦になる場合もあります。
その後、惑星が恒星面内から出始めると光度は一気に元の光度に向かって上がります。 この時間の事を、egress と呼びます。 Ingress と egress は対になっていますが、惑星の軌道が極端な楕円軌道になっている場合は惑星の軌道速度が異なるため、両者の継続時間が異なる場合があります。
なお ingress と egress はさらに細かい分け方があり、手前の天体の端が奥の天体の端と接触した瞬間を first contact (第 1 接触) もしくは exterior ingress、手前の天体が奥の天体に完全に入った瞬間を second contact (第 2 接触) もしくは interior ingress、手前の天体が奥の天体から出始める瞬間を third contact (第 3 接触) もしくは interior egress、手前の天体が奥の天体から完全に出た瞬間を fourth contact (第 4 接触) もしくは exterior egress と分類されます。 これらは系外惑星のみではなく、日食のような天体の通過現象一般に適用される用語です。 ただし系外惑星のトランジットの際に、ここまで細かい分け方が重要になることはほとんどありません。
トランジットの模式図を見ると、惑星が恒星の背後に隠れる時間があることも分かります。
その間は惑星表面からの反射光は恒星に隠されて見えないため、その分だけ光が減少することになります。
惑星表面からの反射光は中心星に比べて極めて弱いためこの時の減光幅は非常に小さくなります。
そのため、惑星の半径が大きく、観測機器の精度が良いなどの条件が整っていないとこの減光は検出出来ません。
しかしこの時の減光の様子は、惑星の物理量を知る上で非常に重要です。
惑星が恒星の背後を通過することは、secondary eclipse (二次食) と呼ばれます。
トランジット法で観測するためには、地球から観測した時に惑星が恒星のちょうど手前を通過するような配置になっていなければいけません。
つまり、トランジット法で発見出来る惑星は、惑星の軌道面と視線方向がほぼ平行である場合に限ります。
視線速度法で出て来たパラメータで表現すると、トランジット法で検出出来るのは \(i\) が \(90^{\circ}\) に近い場合のみということです。
そのため、惑星が存在すれば原理的には検出可能な視線速度法やアストロメトリ法とは違って、惑星が存在したとしてもトランジット法で検出出来る確率は非常に低くなります。
恒星が惑星を持っている場合にトランジットを起こす確率を概算してみます。
地球からトランジットを起こして見える軌道になっている確率 \(P\) は、幾何学的に
\begin{align*}
P\simeq\frac{\Rstar}{a}&\simeq0.09\left(\frac{\Rstar}{\Rsun}\right)\left(\frac{a}{0.05\,{\rm AU}}\right)^{-1}\\
&=9\left(\frac{\Rstar}{\Rsun}\right)\left(\frac{a}{0.05\,{\rm AU}}\right)^{-1}\%
\end{align*}
と書けます。
惑星の軌道長半径が大きいほど、トランジットを起こす確率は低くなります。
最後の式は、軌道長半径が 0.05 AU と極めて近い所を公転する惑星 (ホットジュピターなど) の値で規格化した値です。
中心星に非常に近い惑星であっても、トランジットを起こす軌道である確率はわずか 9% しか無いということです。
地球軌道の 1 AU の場合は、0.5% を下回る確率となります。
また、トランジットを起こす軌道であったとしても、惑星がちょうど恒星の手前を通過している時に観測しなければいけません。
簡単のため惑星軌道を円軌道とし、恒星の手前にいる確率を計算します。
恒星の直径が \(2\Rsun\)、惑星軌道の全長が \(2\pi a\) なので、トランジットを起こす位置に惑星がいる確率 \(P_{2}\) は
\begin{align*}
P_{2}\simeq\frac{\Rstar}{\pi a}&=0.0296\left(\frac{\Rstar}{\Rsun}\right)\left(\frac{a}{0.05\,{\rm AU}}\right)^{-1}\\
&\simeq3\left(\frac{\Rstar}{\Rsun}\right)\left(\frac{a}{0.05\,{\rm AU}}\right)^{-1}\%
\end{align*}
となります。
中心星から 0.05 AU の位置を公転する惑星であっても、トランジットの最中である確率はわずか 3% です。
そのためトランジット法で系外惑星を発見するためには、大量の恒星を長期間に渡って観測し続ける必要があります。
また、惑星が恒星の手前を通過するのに必要なトランジット継続時間 (transit duration) \(t_{\rm transit}\)は、惑星の軌道周期 \(T\) を用いて
\begin{align*}
t_{\rm transit}=\frac{\Rstar}{\pi a}T
\end{align*}
と書けます。
ここまでの考察から分かる事は、軌道長半径が大きな惑星は検出するのが非常に困難であるということです。
軌道がトランジットを起こす位置関係になっている確率が非常に低くなる事と、トランジットをするとしても惑星がちょうどトランジットしている確率も非常に低くなる事が原因です。
例として地球を考えると、先述の通り 1 AU の軌道ではトランジットを起こす確率が 0.5% となります。
また、トランジットしている最中である確率は 0.15% しかありません。
この場合、トランジット継続時間は、365 日の 0.15% なので 0.5 日となります。
遠方から地球を観測しようとした場合、トランジットを起こす確率が 0.5%、さらにトランジットを起こしている最中である確率が 0.15% です。
さらにトランジット継続時間は 12 時間程度しかないため、軌道周期の 1 年のうちわずか 12 時間を逃すとトランジットが観測出来ないことになります。
そのためトランジット法は、長周期の惑星の検出を非常に苦手としています。
惑星の検出確率という点ではデメリットがあるトランジット法ですが、それを補って余りあるメリットもあります。
例えば、視線速度法のような高分散分光が必要ではないため、比較的暗い恒星でも観測出来るという点です。
また、トランジット観測そのものには分光のための装置も必要ありません。
そのため、小型の地上望遠鏡のシンプルな機器でも検出は十分に可能です。
口径がわずか数 cm の地上望遠鏡を用いたサーベイも行われていて、十分に成果を上げています。
その他には、トランジット観測からは非常に多くの情報が得られるというメリットがあります。
得られる情報については後述します。
先述の通り、トランジット法での惑星探査はその検出確率の低さが障害となります。
一つの恒星に着目して観測しても、惑星軌道がトランジットを起こす位置関係にあるのか、いつトランジットを起こすのかは分かりません。
またそもそも惑星を持たない恒星である可能性もあります。
検出確率が低いのであればそれを補うため大量の恒星を観測すれば良い、ということで多くのトランジット法による系外惑星サーベイでは、とにかく多くの恒星を観測して数を稼ぐという作戦が採られています。
視線速度法のような分光観測は不要で、恒星の明るさの変動さえ捉えることができれば良いため、一度に大量の恒星を観測する事は問題ではありません。
多くのプロジェクトでは、観測数を稼ぐため出来るだけ広い視野で空の広い領域を継続的に観測し、高い測光精度を持った装置で明るさの変動を測定しています。
明るさの変動を精度よく測定するには、単に撮影を行って観測対象の明るさの変化を見るのではなく、別の基準星の明るさとの比較を行うほうが有利です。
このような測光方法を相対測光 (differential photometry) と呼びます。
地上からの観測の場合は大気の影響があるため、大気の揺らぎの影響や大気の状態によって恒星の明るさは変化します。
そのため基準星を決めてその基準星との光度の比を取れば、基準星も同じ大気の影響を受けているため大気による影響を打ち消す事が出来ます。
基準星には、それ自体の光度変動が無いものを選びます。
また、観測する視野内のなるべく明るい天体を選ぶことで観測の精度を上げることができます。
観測視野内にちょうど良い基準星が無い場合は、視野内の複数の恒星の明るさを平均した値と比較をする、アンサンブル測光という手法を用いる場合もあります。
最近では、トランジット時の光を分光観測したり、様々な波長で観測したりといった、様々な発展があります。
トランジット法の特徴は、視線速度法に比べると暗い天体まで観測出来るということです。
そのため、トランジット法でサーベイを行う時は比較的暗い天体まで含めて観測を行うことができます。
また、高温の恒星は吸収線が少ないため視線速度法のターゲットには選ばれにくいですが、トランジット法では吸収線の数は関係ないため高温の恒星も観測可能です。
ただし、トランジット法で検出した惑星候補天体を惑星だと確定させるためには、多くの場合視線速度法による追観測が必要です。
トランジット法で分かるのは検出した惑星候補天体の半径であって、質量はトランジット法だけでは決定出来ません。
巨大ガス惑星や褐色矮星、一部の M 型主系列星 (赤色矮星) は、大きさだけを見れば似通っているものもあります。
そのためトランジットを起こしたのが惑星なのか褐色矮星なのか、あるいは暗い恒星なのかは、視線速度法による追観測で質量を測定しなければ判断出来ません。
視線速度法での観測のためには中心星はある程度明るい必要があるため、トランジット法でのサーベイの際も明るい天体を優先的に観測することになります。
なお、トランジット法によって惑星候補天体が複数発見されている系では、視線観測法以外の方法から質量を決定出来る場合があります。
これはトランジットを起こすタイミングが、他の惑星の影響によってわずかに変動する現象から惑星の質量を求める方法で、transit timing variation (TTV) と呼ばれます。日本語だと「トランジット時刻変動」や「トランジット周期変動」となります。
この手法を用いた新たな惑星の発見も行われています。
詳細は別に項目を立てて紹介します。
トランジット法を用いた本格的な惑星探査が始まったのは最近のことですが、トランジット法で惑星を検出するというアイデア自体は以前から存在しました。
トランジット法での惑星検出可能性を最初に指摘したのは Otto Struve という天文学者で、1952 年 10 月の論文で触れられています。
この論文のメインは、高精度の視線速度観測によって系外惑星を観測出来るだろうという主張ですが、同時にそのような系では惑星による食も発生し、それも観測可能だろうと指摘しています。
また、視線速度での観測は高分散分光が必要なため明るい恒星を選ぶ必要があるが、食の検出は測光観測なのでより暗い恒星でも観測可能だという事にまで言及していて、当時としては革新的なアイデアだったと言えます。
しかし実際にトランジット法によって惑星の検出が成功したのは、最初のアイデアから 40 年以上経った 1999 年のことでした。
トランジット法による惑星の検出の初めての成功例は、HD 209458 を公転する惑星 HD 209458b です。
この惑星は、中心星に非常に近い所を公転するホットジュピターの代表例です。
この惑星は事前に視線速度法によって存在が示唆されていて、その観測から得られた周期や軌道の情報を元に HD 209458 の測光観測をしたところ、HD 209458b によるトランジット現象を観測する事に成功しました。
これがトランジット法で惑星が検出された初めての例です。
あくまで HD 209458b の発見方法は視線速度法であり、トランジットによって初めて発見された惑星ではありません。
HD 209458b の初めてのトランジット観測は2 つの観測グループが激しく競合していて、トランジットの観測報告も全く同時期に行われました。
一つは David Charbonneau らによるグループ、もう一つは Gregory W. Henry らによるグループです。
Charbonneau のグループは、1999 年 8 月に同じグループ内の研究者らから HD 209458 の視線速度変動の観測結果を知らされ、この惑星のトランジット法による検出を試みることを決めました。
視線速度法による観測からは惑星の周期が分かっていたため、これを元にトランジットを起こしうる時間帯を狙って測光観測を行いました。
先述の通り、トランジットを起こすかどうかは地球から見た時の軌道の向き次第なので必ずトランジットを起こす保証はありませんが、HD 209458b についてはトランジットを起こす位置関係だったため観測する事が出来ました。
何度か行った観測のうち 1999 年 7 月 9 日と 7 月 16 日の観測で、合計 2 回の完全なトランジット現象 (トランジットの始まりから終わりまでを含んでいる) の観測に成功しました。
一方 Henry のグループも、1999 年 9 月までの観測で HD 209458 に視線速度の変動がある事を突き止めていて、それを元に惑星の軌道要素の決定も行っていました。
Henry らもトランジット現象の観測を試み、1999 年 11 月 7 日の観測で不完全ながらトランジット現象を観測する事に成功しました。
この時の観測では、トランジットの全てを観測することはできませんでしたが、トランジットの前半部分を観測する事に成功しています。
Henry らは完全なトランジットの観測には成功していませんでしたが、Charbonneau らが 9 月に完全なトランジットの観測に成功しているという噂を聞いて論文の発表を急ぐ事にしました。
11 月 7 日の観測の後に急ピッチで論文をまとめ、直後の 11 月 18 日には学術誌に投稿しました。
一方の Charbonneau らのグループは、Henry らの投稿の翌日である 19 日に、同じ学術誌に投稿しています。
Charbonneau らの論文は投稿 4 日後の 11 月 23 日に受理、Henry らの論文は投稿 15 日後の 12 月 3 日に受理され、両者の論文は同年 12 月 16 日に出版された学術誌の同じ号に連続で掲載されました (Henry らの論文が P. 41 - 44、Charbonneau らの論文が P. 45 - 48)。
発見自体は Charbonneau らのグループの方が 2ヶ月ほど早く、トランジットの一部始終も観測出来ていましたが、論文の投稿は 1 日差で Henry らの方が早く、論文の受理は Charbonneau らが先、論文の出版は同時という結果となりました。
Charbonneau らの観測では、トランジットの深さから惑星半径を \(\Rp=1.27\pm0.02\,\RJ\) と求めています。
また、光度曲線からのフィッティングを用いて、軌道の傾斜角を \(i=87.1^{\circ}\pm0.2^{\circ}\) としています。
これらの結果と視線速度法から得られていた最小質量を合わせて、惑星質量は \(\Mp=0.63\MJ\) としました。
一方 Henry らの観測では、惑星半径は \(\Rp=1.42\pm0.10\,\RJ\) としています。
視線速度法の観測からは、惑星の最小質量を \(\Mp\sin i=0.62\MJ\) と計算しています。
また、軌道傾斜角は具体的な値を求めずに \(\sin i \gt 0.993\) とだけ制限を付けています。
これらの発見の直後には、同じく Charbonneau らのグループの Tsevi Mazeh らによって HD 209458b の詳細なパラメータに関する報告がなされています。
Mazeh らの報告では、視線速度法とトランジット法のそれぞれのデータを組み合わせ、惑星半径を \(\Rp=1.40\pm0.17\,\RJ\)、軌道傾斜角を \(i=86.1^{\circ}\pm1.6^{\circ}\)、惑星質量を \(\Mp=0.69\pm0.05\,\MJ\) と求めています。
3 つの論文でそれぞれ惑星半径が異なりますが、Mazeh らによると、この違いはそれぞれ中心星である HD 209458 の半径として採用した値が異なる事が原因です (Charbonneau らの論文では 1.1 太陽半径、Henry らは 1.15 太陽半径、Mazeh らは 1.2 太陽半径でそれぞれ計算)。
トランジット法では正確には恒星半径と惑星半径の比が分かるため、恒星半径の値が違うと惑星半径の値も変わります。
また、計算した傾斜角が異なるのも採用した恒星半径の値の違いが原因で、恒星半径を大きくするほど、トランジットの光度曲線を説明するためには大きな惑星半径かつ小さい傾斜角が必要であるためです。
なお HD 209458b についての最新の値は、惑星半径が \(1.380\pm0.017\,\RJ\)、軌道傾斜角は \(86.590^{\circ}\pm0.046^{\circ}\)、惑星質量は \(0.714\pm0.017\,\MJ\) と測定されています。
また、中心星の半径の値は 1.162 太陽半径です。
HD 209458b のトランジット観測に成功した後、トランジット法による惑星探査が本格的にスタートします。
2002 年には Optical Gravitational Lensing Experiment (OGLE) プロジェクトによっ てOGLE-TR-56b が発見され、その後の視線速度法を用いた追観測で質量が求められ、惑星である事が判明しました。
これが、トランジット法を用いて初めて惑星が発見された例です。
OGLE は名前にもある通り、本来は重力レンズ現象による増光から見えない天体や物質を探るプロジェクトで、地上の大型望遠鏡を用いて多数の天体の測光観測をしています。
2001 年にトランジット法を用いた観測から惑星を検出する試みを行い、合計 60 例程度のトランジットイベントを検出しました。
これらの多くのイベントのうち、初めて惑星によるトランジットだと確認されたものが OGLE-TR-56b です。
OGLE-TR-56b の軌道周期はわずか 1.2 日で、2008 年に発見された WASP-12b にその座を譲るまでは最も軌道周期の短い惑星でした。
先述の通り、トランジット現象が観測されてトランジットしている天体の半径が判明しても、それが惑星かどうかはすぐには分かりません。
減光が誤検出でないかの確認、およびその天体の質量を確定させるためには、主に視線速度法による追観測が必要です。
OGLE-TR-56b の質量を確定させるために OGLE-TR-56 の分光観測が行われましたが、この恒星は距離が約 4900 光年と非常に遠く、実視等級が 16.6 等と極めて暗い恒星だったため、高分散分光観測には向かない対象です。
OGLE によるトランジットサーベイで観測していたのは暗い恒星が多く、発見された多くのトランジットイベントの追観測はどれも困難を極めました。
また、惑星の通過による減光ではないものがあたかも惑星のトランジット現象のように観測される、いわゆる偽陽性 (false positive) だったイベントも多いです。
その後の観測や解析も含めると、最終的に OGLE でのトランジット観測によって 7 個の惑星の存在が確定しています。
トランジットと思われるイベント自体は数百例観測されましたが、残りは偽陽性か、惑星によるものかが未確定のイベントです。
トランジット法による初めての惑星の検出成功と、初めての惑星の発見成功の後、多数のトランジット法を用いた惑星探査プロジェクトが動いています。
OGLE による観測が行われていた時期には、日本でもすばる望遠鏡を用いた観測の試みなどが行われていました (発見は出来ず)。
トランジット現象自体が発生確率の低いイベントなので、トランジット観測専用の、広視野の望遠鏡を用いて広範囲を同時に継続して観測するという戦略を持ったプロジェクトがほとんどです。
多くの場合は、自動化された望遠鏡を用いて全天の広範囲を観測しています。
大量の恒星の光度を観測して光度変化を解析し、トランジットによる減光が発生していると思われるイベントを惑星候補天体とします。
そのイベントが偽陽性ではないか、また偽陽性でなかった場合に惑星の質量がどの程度なのかを測定するためには、一般には視線速度法での追観測や TTV での質量測定が必要となります。
OGLE による一連のサーベイでの発見の次にトランジット法による惑星発見に成功したのは、Trans-Atlantic Exoplanet Survey (TrES) プロジェクトによる観測です。
TrES プロジェクトは、HD 209458b のトランジットを初検出した Charbonneau などが中心となって設立したプロジェクトです。
口径 4 インチの望遠鏡での自動観測を行い、2004 年に初めての惑星を発見しています。
現在はプロジェクトは動いていませんが、計 5 個の惑星の発見に成功しました。
その後も、2006 年 6 月にはXO 望遠鏡 (XO telescope) を用いた観測プロジェクトで、同年 9 月にはほぼ同時期にHATNet と SuperWASP というプロジェクトによって系外惑星が発見されています (初発見報告の論文は HATNet がわずかに先)。
特に HATNet と SuperWASP の 2 つのプロジェクトは地上望遠鏡を使ったトランジットサーベイプロジェクトの二大勢力で、双方ともに毎年複数個の系外惑星を発見し続けています。
これらのプロジェクトは、トランジット法による惑星検出に特化した、比較的小型の望遠鏡を使った観測プロジェクトです。
XO 望遠鏡はあまりアクティビティは高くありませんが、HATNet とその関連プロジェクトの HAT-South、SuperWASP はその後も継続的にトランジット法で惑星を検出し続けています。
観測の基本原理はシンプルである事から、これらのプロジェクト以降にも多数の観測プロジェクトが立ち上がっていて、いくつかは成果を上げています。
最近の例だと、2012 年に初検出に成功した Kilodegree Extremely Little Telescope (KELT) などがあります。
一方、大気の影響を受けず、昼夜に関係なく 24 時間観測出来る宇宙望遠鏡を使ったトランジット観測も行われています。
トランジット法による惑星検出を主要な目的の一つとした初めての宇宙望遠鏡は、フランスが中心となって開発し 2006 年 12 月に打ち上げられた COROT です。
COROT の主要な目的は、惑星のトランジットを検出することと、対流や自転などによる恒星の変光を観測する事です。
COROT の運用は既に終了してしまいましたが、観測期間中に多数の系外惑星を発見しました。
未確定の惑星候補天体はまだあり、確認のための追観測は続いています。
ここ数年で発見されている系外惑星の様相を大きく変えたのが、2009 年 3 月に打ち上げられたケプラーです。
ケプラーは、視野内にある大量の恒星の光度を非常に精度良く測定する事が可能です。
そのため観測数を一気に稼ぐ事ができ、なおかつ比較的小型の惑星によるトランジットも検出する事が出来ます。
冒頭に年別の系外惑星の発見個数のグラフを載せましたが、ケプラーが本格的に観測を開始した 2010 年はトランジットの発見個数が増え、2014 年には一気に 700 個以上が追加されました。
これらのデータは、既にケプラーによって大量に取得されていたデータを解析して惑星候補天体を見つけ、それらを視線速度法などによって追観測することによって存在が確定したものです。
さらに 2016 年には 1200 個以上が新たに追加されました。
これはケプラーによる観測データを統計的に処理する手法の開発により、検出されたシグナルが惑星によるものかそうでないかを判断する効率が大幅に向上したことが原因です。
従来の方法では、トランジットが検出された場合は視線速度法か TTV (複数惑星系に限る) によって惑星であることを確認し、また同時に惑星質量を測定していました。
しかし新しく開発された解析手法では、これまでの観測結果を元にしてトランジットの光度曲線の特徴から惑星由来かそうでないかを判定する仕組みを採用しています。
これによって、時間がかかる追観測を必要とせずにトランジットによる惑星候補を惑星と確定させることが可能となりました。
ケプラーの測光精度はおよそ 20 ppm、つまり 0.002% の光度変化を検出可能です。
地球程度の半径を持つ惑星が太陽をトランジットした場合は、減光率は 0.008% 程度になるのでした。
従って、ケプラーは原理的には太陽を公転する地球を検出出来るだけの精度を持っていることになります。
(現実には、トランジットを起こしている確率や、トランジット継続時間などの問題があるため、容易ではありません)
なお、ケプラーは 2013 年 5 月に 2 つ目のリアクションホイールが故障し、姿勢を自由に変更することが不可能になりました。
人工衛星や探査機の方向を自由に変える為には最低 3 つのリアクションホイールが必要であり、ケプラーは 4 つのリアクションホイールが搭載されていましたが、そのうちの 2 つが故障したため自由な姿勢変更が出来なくなりました。
望遠鏡を特定の方向に向け続けるには微妙な姿勢の調整が必要ですがそれが出来なくなったため、しばらくはスラスタの噴射で姿勢調整を行っていました。
その後 8 月にはリアクションホイールの復旧を断念しています。
観測機器には問題は無いため、リアクションホイール 2 つでも観測が可能な観測計画の募集が始まりました。
2014 年 5 月になって、新しいケプラーの観測計画であるK2 ミッションが採択されました。
これは、残っている正常な 2 つのリアクションホイールと、太陽光の光圧による姿勢の変化を利用して 83 日間ずつの観測を行うというものです。
5 月 30 日から K2 ミッションによる観測が始まり、同年の 12 月には K2 ミッションによる系外惑星の初めての発見 (HIP 116454b) が報告されました。
ケプラーのメインミッションでは、はくちょう座の方向を中心とした狭い領域を集中的に観測していましたが、K2 ミッションでは太陽光圧を利用して姿勢制御を行うという都合もあり、黄道面付近を観測しています。
これによりしばしば太陽系内の天体のケプラーの観測視野内に入るため、従来の系外惑星探査だけではなく、太陽系内天体の観測にも使われています。
ケプラーを用いた K2 ミッションは順調に続いていますが、2018 年中に姿勢制御のための燃料も尽きるため、その段階を持って観測ミッションの終了が予定されています。
これらの継続的なミッションの他にも、大型の望遠鏡を使った単発的なトランジットサーベイが行われる事はあります。
例としては、2006 年にハッブル宇宙望遠鏡を用いて行われたトランジット法による惑星探査プロジェクトである Sagittarius Window Eclipsing Extrasolar Planet Search (SWEEPS) があります。
これは、銀河中心の方向であるいて座 (Sagittarius) の方向を観測して系外惑星を発見しようというプロジェクトでした。
将来的な宇宙望遠鏡を用いたトランジット法による惑星探査の計画も複数あります。
スイス宇宙局が中心となって進めている、ESA の CHEOPS (CHaracterising ExOPlanets Satellite) は、32 cm 口径の望遠鏡でのトランジット観測を行う探査機です。
CHEOPS は 2018 年終わり頃の打ち上げを目指しています。
NASA が進めているものには、TESS (Transiting Exoplanet Survey Satellite, トランジット系外惑星探索衛星) があります。
一部の狭い範囲内を集中的に長期間観測していたケプラーとは違って、TESS では数年かけて全天の掃天観測を行います。
そのため、ある特定の領域を見ている期間は短くなるため長周期の惑星は発見しづらくなりますが、観測範囲がケプラーより大幅に広くなる分だけ観測数を稼ぐことができます。
また距離が近く明るい恒星を対象とするため、視線速度法での追観測がしやすくなります。
太陽系に比較的近い 50 万個あまりの恒星を観測し、1000 個から 10000 個程度の惑星を新たに発見することが期待されています。
TESS は 2017 年の打ち上げが決定していましたがやや遅れ、2018 年 4 月 18 日に打ち上げられました。
TESS は地球を細長い大きな楕円軌道で公転する軌道に投入されます。
この軌道は月との 2:1 の軌道共鳴である P/2 と呼ばれるもので、月との共鳴の影響で軌道が安定化されます。
TESS と同様のコンセプトの探査機は ESA も計画していて、
トランジットの周期からは惑星の軌道周期を得ることができます。
恒星の質量が分かっていれば、軌道周期から惑星の軌道長半径も計算することができます。
さらにトランジット法で観測出来るということは、惑星の軌道面をほぼ真横から見ているということになるため、軌道面に垂直な方向と視線方向の成す角がほぼ \(90^{\circ}\) であるということも分かります (そのほかの要素と組み合わせることによって、より正確な値を計算する事が可能)。
そのため、視線速度法による観測と組み合わせることによって惑星の真の質量も得ることができます。
さらに、惑星が恒星の手前を通過する primary transit と、惑星が恒星の背後を通過する secondary eclipse のタイミングから、惑星の軌道離心率を求める事も可能です。
軌道が円軌道であれば、primary transit と secondary eclipse は交互に等間隔に観測されます。
しかし楕円軌道であれば等間隔からずれて観測されるため、そのずれ具合から軌道離心率を決めることができます。
Secondary eclipse による減光は非常に小さいため条件が良い場合しか観測出来ませんが、測光観測の精度の向上に従ってこれまで困難だった惑星での secondary ecllipse 観測も可能になる事が期待されます。
トランジット法からは、惑星に関する非常に多くの情報を取り出す事が可能です。
トランジット法の最大の特徴は、視線速度法など他の発見手法では分からなかった、惑星の半径が精度よく決定出来るという点です。
「トランジット深さ」の所で紹介したように、トランジットしている時の減光率はおおまかには中心の恒星の大きさと惑星の大きさによって決まります。
測光観測をしてトランジット時の減光率を測定し、さらに恒星の大きさは別の観測から分かっているものとすると、惑星の半径についての情報が得られます。
惑星半径が小さければ減光率も小さくなるため光度測定の精度が必要とされますが、近年の観測、特にケプラーなど宇宙空間からの観測では地球程度の大きさの系外惑星も発見され始めています。
先述の通り,トランジット法で検出されている惑星を視線速度法で追観測することによって、惑星の真の質量が推定できます。
このトランジット法と視線速度法の組み合わせは非常に重要で有意義な結果をもたらします。
トランジット法で半径が分かり、視線速度法と組み合わせて真の質量が分かるということは、惑星の平均密度までもが判明するからです。
惑星の平均密度が分かると、その惑星が何を主成分として成り立っているのかが分かります。
例えば地球のような岩石惑星の場合は平均密度はおよそ \(5\,{\rm g/cm^{3}}\) 程度ですが、木星のような巨大ガス惑星の場合は平均密度は \(1\,{\rm g/cm^{3}}\) のオーダーとなり、大きく異なります。
ある系外惑星の平均密度が \(1\,{\rm g/cm^{3}}\) に近い値であれば、確実にガスを主成分とした巨大ガス惑星であると言えます。
また、密度が大きければ岩石惑星だと言えますし、さらに高密度であれば金属の含有量が多い惑星だろう、という推測も可能です。
これまでに発見された系外惑星の平均密度は様々で、明らかにガス惑星である低密度のものから、岩石惑星や金属が多いと思われる高密度のものまで発見されています。
さらに、巨大ガス惑星と岩石惑星の中間程度の大きさを持ち、密度はどちらのグループでも説明出来ないものも多数発見されています。
このような天体は、固体コアの周りにある程度の水素・ヘリウムの大気を持っているか、ある程度の水蒸気大気を持っているなどで説明されます (どちらなのかはその惑星によります)。
トランジット法の興味深い点は、惑星大気に関する情報を取り出す事が可能だという点です。
惑星がトランジットを起こしていない時は恒星の光をそのまま見ていることになりますが、惑星がトランジットを起こして減光している時は、光の一部は惑星の大気を通過して地球へやって来ていることになります。
そのため、トランジットを起こしている時の恒星のスペクトルと、トランジットを起こしていない時の恒星のスペクトルを比較すると、惑星大気の透過スペクトルに関する情報を取り出す事が可能です。
惑星のトランジット時のスペクトルを観測することから、これは トランジット分光観測 (transit spectroscopy) と呼ばれています。
取り出した惑星大気の透過スペクトルを調べる事で、惑星大気に含まれる成分を調べることができます。
例えば、多くのホットジュピター大気の透過スペクトルにはナトリウムの吸収線が検出されているため、大気中に気体のナトリウムが含まれている事が分かっています。
その他、一部の惑星ではカルシウムやカリウムなどの金属元素に加え、水蒸気、二酸化炭素、一酸化炭素やメタンの検出も行われています。
大気の透過スペクトルに関する観測は、HD 209458b のトランジットで初めて確認され、以後様々なトランジット惑星で行われています。
惑星大気の透過スペクトルを取り出した手法を用いて、惑星の反射スペクトルと惑星自身の熱放射に関する情報を取り出す事も可能です。
この場合は、secondary eclipse 前後のスペクトルを比較します。
惑星が恒星の背後に隠れる直前は、(両者を分離は出来ませんが) 恒星からの光と、惑星表面での反射光と惑星自身の熱放射の合計を観測していることになります。
惑星が恒星の背後に隠れて secondary eclipse を起こしている最中は、惑星表面での反射光と惑星の熱放射は観測出来ず、恒星からの放射のみを見ていることになります。
そのため両者の比較をして差し引くことによって、惑星表面での反射光と惑星自身の熱放射を得ることができます。
トランジット惑星の secondary eclipse の観測は 2005 年に HD 209458b で初めて成功し、以後多数のトランジット惑星でも検出されています。
赤外線領域での観測でこれを行うと惑星からの赤外線放射が分かるため、これを元に惑星の平衡温度を求めることができます。
また、惑星からの反射光と惑星が受け取っている光の量から、惑星のアルベド (反射率) を求める事も可能です。
例えば 2011 年に行われたホットジュピター TrES-2 の観測では、TrES-2 のアルベドが 1% 未満と非常に低い値を示す事が分かっていて、これは現在までに分かっている惑星のアルベドの中では最も低い値となっています。
ホットジュピターのアルベドが表面温度によってはかなり低くなる可能性は以前から示されていましたが、1% 未満という非常に低いアルベドは既存の理論では説明出来ていません。
さらに、secondary eclipse の光度曲線を詳細に観測することによって、惑星の表面温度分布のマップを作る事が出来ます。
2007 年に、ホットジュピターである HD 189733b の観測によって初めての系外惑星のマップが作られました。
マップと言ってもかなりぼんやりとした表面温度分布しか分かっていませんが、表面温度が一番高くなっているポイントが恒星直下点 (sub-stellar point) と明らかにずれているということが分かっていて、これはホットジュピターの大気は東西方向に非常に高速で循環しているということを示す結果となっています。
このことも、理論的な研究では以前から予測されていた現象です。
これらの様々なデータから惑星の昼側と夜側の温度差が分かり、昼側から夜側への熱輸送効率も分かります。
昼夜間の温度差が小さく非常に効率的な熱輸送が起きているガス惑星、温度差が大きく熱輸送が効率的ではないガス惑星など、同じホットジュピターでも異なる大気循環をしていることを示唆する結果も得られています。
さらに、大気構造に関する理論的モデルを組み合わせると、惑星の反射スペクトルと熱放射から惑星の大気構造や大気組成の情報も得られます。
トランジット観測を複数の波長で行う事によって、トランジット惑星の大気に関する更なる情報を得ることができます。
トランジットの観測をする場合、異なる波長ではトランジットの様子が違って見える事があります。
例えばホットジュピターを紫外線領域でトランジット観測すると、可視光領域でトランジット観測した時よりも減光率が大きくなります。
減光率が大きいという事は、惑星の見かけの大きさが大きくなっているという事に対応します。
この現象は、ホットジュピターが高温で大きく広がった希薄な水素原子の大気を持っていると考える事で説明出来ます。
ホットジュピターは恒星に加熱され、実際の惑星半径よりも 3 倍程度大きく広がった水素原子の大気を持ちます。
可視光線の領域ではこの希薄な水素原子の大気は見えないため観測にかかりませんが、紫外線領域には水素原子のライマンアルファ線があるため、恒星からの紫外線は惑星の高温の水素原子大気によく吸収されます。
そのため、紫外線で見ると広がった水素原子の大気の分だけ惑星が大きく見えるという事です。
同様に、紫外線よりさらに高エネルギーな X 線でのトランジット観測にも最近成功していて、こちらも可視光線でのトランジットより減光率が大きい事が分かっています。
紫外線領域でのトランジット観測からは、更にホットジュピターからの大気散逸の様子も知ることができます。
ホットジュピターの紫外線領域、特にライマンアルファ線でのトランジット観測からは、トランジットの光度曲線が左右非対称になり、惑星本体がトランジットを終えた後でも紫外線領域ではまだ減光が続くという例がある事が分かっています。
これは、ホットジュピターからは大量に大気が散逸していて、散逸して行く大気が彗星の尾のように後ろになびいているため、その部分による減光が続いていると考える事で説明することができます。
この現象は HD 209458b や HD 189733b などで確認されていて、散逸して行く大気の量は 1 秒あたり \(10^{10}\,{\rm g}\)、1 万トンにもなると推定されています。
また、ライマンアルファ線のドップラーシフトから散逸して行く大気の速度も測定されていて、音速を超える速度で大気が流れ出しているということも分かっています。
そのほかにも、赤外線領域でのトランジットを同時に多波長で観測する事で、惑星の大気構造を知ろうという研究も行われています。
スペクトルの様子から、雲やもやが少なく済んだ大気を持っているのか、雲やもやが多い大気を持っているのかなどといった、惑星大気中の雲やもやについての情報も得ることができます。
系外惑星の中には、惑星の軌道傾斜角 (この場合、恒星の自転軸と惑星の公転軸が成す角度を指す) が判明しているトランジット惑星があります。
この角度は spin-orbit angle と呼ばれます。
恒星の自転 (spin) の軸と、惑星の軌道 (orbit) の軸が成す角度を意味します。
この角度の測定には、ロシター・マクローリン効果 (Rossiter-McLaughlin effect) と呼ばれる効果の観測を行います。
(あるいは単に「ロシター効果」と呼ばれる事も多いです)。
この効果の歴史は古く、初めはお互いを隠し合う連星系である食連星 (eclipsing binary) における研究が元になっています。
1924 年にアメリカ人の天文学者 Richard Alfred Rossiter と、Dean B. MacLaughlin によって、別々の食連星の観測から実証されています (これらを報告する論文は同じ科学誌の同じ号に連続で掲載されていて、Rossiter の論文の方が先に掲載されています)。
ロシター効果では、トランジット時に惑星が恒星のどの部分を隠しているかによる視線速度の見かけの変化から、恒星の自転軸と惑星の公転軸の成す角を求めています。
恒星は自転しているので、例えば向かって左から右の方向に自転している場合は、恒星の左半分は近付いてくる速度成分を持つため青い方にドップラーシフト (青方偏移) をし、右半分は遠ざかる速度成分を持つため赤い方にドップラーシフト (赤方偏移) をします。
恒星全体が見えている場合は、左半分と右半分がキャンセルするため見かけの視線速度成分はゼロになりますが、恒星の一部が惑星によって隠されると完全にキャンセルせずに見かけの視線速度成分を持つようになります。
通常、トランジットを起こす時はまず左半分の近付いてくる側 (青方偏移している側) を隠し、その後恒星の中央付近を通って右半分の遠ざかる側 (赤方偏移している側) を隠し、最後にトランジットを終えます。
惑星が近付いてくる側を隠している時は恒星は遠ざかっている様に見え (赤方偏移して見え)、遠ざかる側を隠している時は恒星は近付いているように見えます (青方偏移して見えます)。
恒星の自転軸と惑星の公転軸が揃っている、つまり恒星の自転方向と惑星の公転方向がきれいに揃っている場合は、この見かけの赤方偏移と青方偏移の様子は対称になります。
しかし、恒星の自転軸と惑星の公転軸がずれている場合は、恒星の左半分と右半分を惑星が均等に隠すとは限らないため、見かけの速度変動が対称ではなくなります。
また恒星の自転方向と惑星の公転方向が逆になっているような極端な場合は、見かけの速度変動も逆になります。
トランジット中に起きるこれらの効果を、トランジット分光観測を用いて精密に測定することによって、恒星の自転軸と惑星の公転軸のずれ (spin-orbit misalignment) を測定することができます。
食連星でのロシター効果は昔から観測例がありますが、系外惑星でのロシター効果による角度のずれの測定は、2005 年に HD 209458 の観測で初めて成功しています。
このとき測定されたずれの角度は 4° 程度と小さな値になっています。
恒星の自転軸と惑星の公転軸がほぼ反対、つまり恒星の自転方向と惑星の公転方向が逆向きである、逆行軌道 (retrograde orbit) を持つ系外惑星が発見されたのは、2009 年 8 月のことです。
8 月 13 日に WASP-17b が逆行軌道を持つという観測結果が公表され、そのわずか 1 日後には別の 2 つのグループによって HAT-P-7b が逆行軌道を持つという観測結果が公表されました。
ロシター効果については、以下のサイトも参考にしてください。
ロシター効果の他には、ドップラートモグラフィー (Dopplar tomography) という手法によっても、惑星の公転軸と恒星の自転軸の角度を測定することが出来ます。
これは、惑星が恒星の表面の一部を隠すことによって、隠されている部分の光が届かなくなることを利用した手法です。
ドップラートモグラフィーでは、トランジット最中の恒星のスペクトルの形状の変化をとらえます。
恒星の自転による (地球から見た時の) 視線方向の速度は恒星表面の位置によって異なるため、恒星は各場所で異なるスペクトルの形状を持ちます。
通常はこのスペクトルの形状を分解することは困難ですが、惑星が恒星の一部分を隠すことによってその部分からのスペクトルは地球に届かなくなるため、それがスペクトルにおける分光学的な "影" (spectroscopic shadow) として検出できます。
惑星のトランジットの進行に伴って惑星が恒星を隠す位置も変わるため、 "影" も時間にともなって変化します。
恒星の自転軸と惑星の公転軸が揃っている場合は、この "影" の動きはトランジットの中心に対して対称な分布として検出されます。
しかし大きく傾いている場合は、非対称な形状として検出されるため、対称からのずれの大きさから、恒星の自転軸と惑星の公転軸の角度を測定することが出来ます。
この手法を利用した角度の測定例も増えてきています。
恒星の自転によるスペクトル線の広がりは自転が高速なほど大きくなり、ドップラートモグラフィーも検出しやすくなります。
また、トランジットと思われる減光が検出されている系に対して、ドップラートモグラフィーを検出することで惑星かどうかの確認を行うことも可能です。
そのためドップラートモグラフィーは、視線速度法での追観測には不利であった、高温で高速で自転する恒星のまわりにおける惑星の確認手法としても注目されています。
トランジット法での検出確率
トランジット法のための技術
トランジット法のターゲット
トランジット法による発見
HD 209458b
OGLE-TR-56b
トランジット法による観測
主な観測 (地上望遠鏡)
主な観測 (宇宙望遠鏡)
未確認の候補天体はまだ数千個あり、今後も続々と追加されます。
将来的な観測
2024 年 2026 年の打ち上げを目指している PLATO (Planetary Transits and Oscillations of stars) の計画があります。
トランジット法で分かる事
惑星の軌道要素と真の質量
惑星の平均密度
惑星大気の透過スペクトル
惑星の反射スペクトルと熱放射
さまざまな波長でのトランジット観測
惑星の軌道傾斜角
観測成果 - すばる望遠鏡、太陽系外惑星の公転軸傾斜角の測定に成功 - すばる望遠鏡
観測成果 - すばる望遠鏡、主星の自転に逆行する太陽系外惑星を発見 - すばる望遠鏡
観測成果 - すばる望遠鏡、大きく傾いた軌道を持つ惑星系を次々に発見 - すばる望遠鏡
| 検出に有利 | 惑星半径が大きい (減光率が大きいため) |
| 恒星に近く軌道周期が短い (トランジット確率が高いため) | |
| 検出に不利 | 惑星半径が小さい (減光率が小さいため) |
| 恒星から遠く軌道周期が長い (トランジット確率が小さい) | |
| 得られる情報 | 惑星の公転周期 |
| 軌道長半径・離心率を含む軌道要素 | |
| 惑星の半径 | |
| 惑星の真の質量、平均密度 (視線速度法と組み合わせた場合) | |
| 惑星大気の透過・反射スペクトル、熱放射 (観測例多数) | |
| 温度・アルベド・大気構造や大気組成、大気散逸 (観測例有り) | |
| 恒星自転軸と惑星公転軸の角度 (観測例有り) | |
| その他 | 中心星が暗くても検出可能 (ただし視線速度法での追観測困難) |
| 高温星や高速自転星でも検出可能 | |
| 惑星を持っていた場合の検出確率は非常に低い | |
| シンプルな光学系での検出が可能 | トランジット法だけでは質量決定不可 |
トランジット法による誤検出
トランジット法での検出にも、やはり誤検出は付き物です。 単に観測機器の影響などよる誤検出とは別に、別の物理現象による減光を惑星のトランジットによるシグナルだと勘違いする可能性があります。 このようなシグナルは、false positive (偽陽性) と呼ばれます。 トランジット法において偽陽性となり得る要因はいくつか存在します。
偽陽性の原因として最も多いのが、惑星ではなく恒星による食が起きている場合です。 観測対象の恒星が連星系になっていて、地球から見て伴星が主星の端をかすめるような食連星になっている場合は、伴星の食による主星の減光幅は小さく、惑星による食だと誤認される事があります。 このような、伴星が主星の端をかすめる食連星は、grazing eclipsing binary と呼ばれます。 文字通り、かすめる (graze) 食連星 (eclipcing binary) です。 通常の食連星であれば、減光幅が惑星ではあり得ないほど大きくなったり、通常は検出が難しい secondary eclipse の減光幅も大きく検出しやすくなるため、惑星のトランジットとは区別しやすくなります。 しかし grazing eclipsing binary の場合は伴星は主星をかすめるだけなので、減光幅が惑星のトランジットによる場合と同程度になる事があります。
惑星による食の場合は、光度曲線は U 字型に近くなりますが、grazing eclipsing binary の場合は光度曲線は V 字型に近くなります。 そのため、高精度の観測によって得た光度曲線の形状から判断を行う事が可能です。 また、視線速度法による追観測から質量を求め、惑星か grazing eclipsing binary かを判断することも可能です。 地上望遠鏡による精度のそこまで高くない観測では、偽陽性の大部分がこの grazing eclipsing binary によるものです。
その他の可能性は、観測対象の恒星の非常に近くにトランジット惑星を伴った別の恒星がいて、その恒星でのトランジット現象のシグナルが混入する場合があります。 また似たような状況として、観測対象の恒星の非常に近くに食連星があり、そのシグナルが混入する事もあります。 非常に近く、というのはあくまで天球面上の投影された距離 (見た目の距離) での話なので、実際に両者が近距離にいるのか、遠距離だが同じ方向にあるため近くに見えるのか、近距離にいてなおかつ連星になっているのかは関係ありません。 これらの可能性を排除するためには、高分解能の撮像観測でトランジット法での観測対象周辺を観測し、他の天体が混入していないかを調べるなどの方法が採られます。
また、恒星の表面活動による光度の変化がトランジット現象のように見える可能性もあります。
たとえば恒星が黒点を持っている場合は、恒星の自転に伴って黒点の見え方が変化し、トランジットに似た変光を起こす可能性があります。
一般相対論によると、質量を持った物体は周囲の空間を歪めます。
光は空間を直進しようとしますが、天体の質量によって歪められた空間を通過する際は歪んだ空間を "直進" するため光の進路が曲げられます。
これは、天体の重力によって光が曲げられたと解釈することができます。
ある遠方の天体を見た時に、地球とその遠方の天体の間に別の天体がある場合、遠方の天体からの光が間にある天体の重力によって曲げられ、本来の像とは異なる形状や明るさで観測出来る事があります。
このような現象を一般に重力レンズ現象 (gravitational lens effect, gravitational lensing) と呼びます。
特に重力レンズを起こす天体が恒星程度の小質量である場合、その現象は重力マイクロレンズ (gravitational microlensing) と呼ばれ、恒星とその惑星によって引き起こされる重力マイクロレンズ現象を観測することによって惑星の存在を間接的に検出する事が可能です。
重力レンズ現象自体は、1924 年に Orest Chwolson という物理学者によって言及されていて、1936 年にアルベルト・アインシュタイン (Albert Einstein) によってより詳細に示されました。
アインシュタインは、背景の天体、レンズ現象を引き起こす天体、観測者の 3 者が一直線に並んだ場合は像がリング状に見えることを示したため、重力レンズによって出来るリングのことをアインシュタインリング (Einstein ring) と呼びます。
また、アインシュタインリングの半径の事をアインシュタイン半径 (Einstein radius) と呼びます。
背景にある、重力レンズの影響を受ける天体の事をソース天体、ソース天体と地球の間にあって重力レンズを引き起こす原因となっている天体をレンズ天体と呼びます。
重力レンズ効果の観測では、背景にあるソース天体の光度変化や像の変化が重要になります。
重力レンズ現象は、大きく分けて 3 つの種類があります。
一つ目は強い重力レンズ (strong lensing) で、レンズ天体が非常に重く、重力レンズ現象が顕著に見える場合です。
強い重力レンズでは、アインシュタインリングが見える場合、ソース天体がレンズ天体の横に歪んだ弧状に見える場合、ソース天体がレンズ天体の周りに複数の像として観測出来る場合があります。
重力レンズ現象が実際に観測出来るかどうかは疑問視されていましたが、1979 年 3 月にクエーサーである QSO B0957+561 が重力レンズ現象によって 2 つの別のクエーサーのように見えているという事が確認され、これが重力レンズ現象の初めての発見例となりました。
このクエーサーは "ツインクエーサー" と呼ばれています。
ツインクエーサーの発見後も、強い重力レンズの影響を受けている天体が複数発見されています。
重力マイクロレンズ法
重力レンズの物理
様々な重力レンズ現象
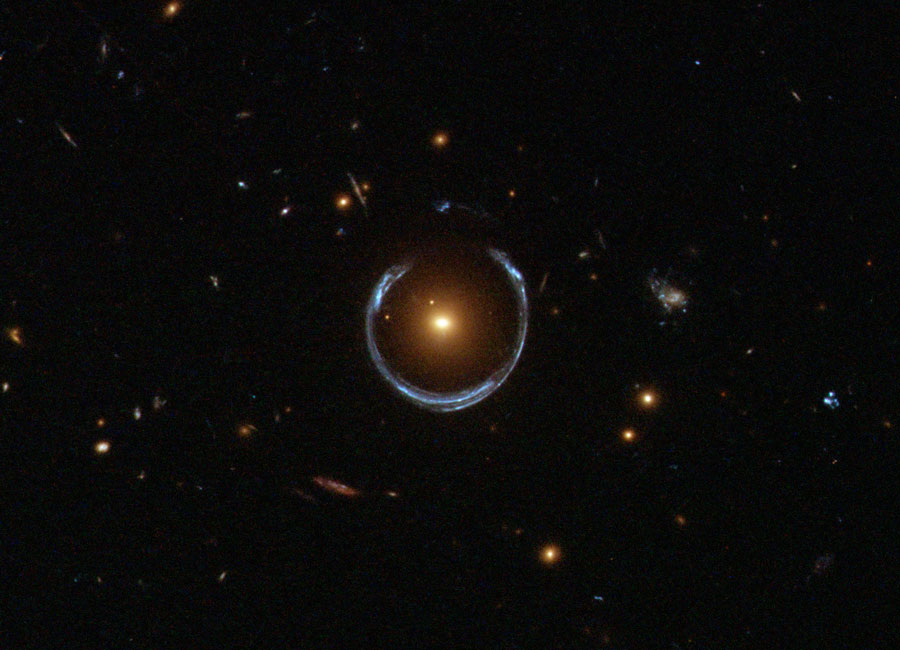
強い重力レンズの一例。(©NASA)
上に挙げた写真は、ハッブル宇宙望遠鏡を使って実際に観測された強い重力レンズによるアインシュタインリングです。 手前にある赤っぽい銀河がレンズ天体となり、背後にある青っぽい銀河の像がリング状になっているのが分かります。
2 つ目は弱い重力レンズ (weak lensing) で、レンズ天体による影響が弱いものです。 この場合は強い重力レンズのようにはっきりとした効果は現れず、統計的な解析から影響を割り出します。 例えば、宇宙マイクロ波背景放射が途中の銀河等の天体によって影響を受けて揺らぎが生じる現象があります。
3 つ目がここでの本題であるマイクロレンズ (microlensing)で、レンズ天体が恒星程度かそれ以下の非常に軽い天体の場合を指します。 この場合は、ソース天体の歪みや複数の像といった現象は識別出来ず、レンズ天体による重力レンズによってソース天体からの光が集光され、一時的にソース天体が増光する現象として観測されます。

重力レンズ現象の模式図
上に重力レンズ現象の模式図を載せました。 破線で示したのがレンズ天体が無かった場合の光の進路、実線で示したのが実際の進路です。 強い重力レンズの場合は、レンズ天体によって曲げられた影響で、ソース天体の "虚像" が見えることになります。 この虚像はアインシュタインリングとして見えたり、複数の像に分かれて見えたり、大きく弧状に歪んだ像として見えたりします。 マイクロレンズの場合は、レンズ天体の重力によってソース天体の光が "集光" され、ソース天体が本来の明るさよりも増光して見えます。
強い重力レンズでは、重力源であるレンズ天体は銀河や銀河団等の規模が大きいものになりますが、重力マイクロレンズでは恒星やそれ以下の小さな天体がレンズ天体となります。
レンズ天体の質量が恒星程度の軽い天体による重力マイクロレンズでは、強い重力レンズ効果のような顕著な現象は発生しませんが、レンズ天体によって集光されて背景のソース天体が実際よりも明るく見えることがあります。
ソース天体、レンズ天体、観測者 (地球) はお互いに運動しているため、ほぼ一直線に 3 者が並ぶ関係に来た時に一時的にソース天体が増光する現象として観測することができます。
この増光の事をレンズイベント (lens event) と呼びます。
重力マイクロレンズ現象を用いた目に見えない天体の検出を初めて提案したのは、ポーランドの天文学者であるボフダン・パチンスキー (Bohdan Paczyński) でした。
このアイデアが発表されたのは、1986 年のことです。
重力マイクロレンズ法は初めは銀河系内のダークマターの検出のための手法として考案され、その後発展したものです。
銀河系内や宇宙に多く存在していると考えられているダークマターの候補には、非常に大きく分けると 2 種類あります。
一つは、電磁気的な相互作用を行わない未知の素粒子であるという説、もう一つは既知の物質 (バリオン) で出来ているが、暗くて観測出来ない天体が大量に存在しているという説です。
前者の一例が、弱い相互作用と重力相互作用のみを行う重い素粒子である WIMP (Weakly Interacting Massive Particles) です。
英語の "wimp" には元々「弱虫」や「意気地なし」という意味があり、観測にかからないこのような粒子の特性に引っ掛けた名称にもなっています。
一方、後者の未知の素粒子ではなく既に知られている通常の物質で出来ているものの、小さく暗いため観測出来ない天体は、MACHO (MAssive Compact Halo Objects) と呼ばれています。
パチンスキーは、このような MACHO は重力マイクロレンズによって観測可能だと考えました。
すなわち、ある方向の天体を観測していてその天体と観測者の間を MACHO が通過すれば、MACHO の重力によるマイクロレンズで背景の天体が一時的に増光する現象が観測出来るということです。
重力レンズ現象において、アインシュタインリングの見かけの角度 \(\theta_{\rm E}\)は
\begin{align*}
\theta_{\rm E}=\sqrt{\frac{4GM}{c^{2}}\frac{D_{\rm LS}}{D_{\rm S}D_{\rm L}}}
\end{align*}
と書くことができます。
ここで \(M\) はレンズ天体の質量、\(D_{\rm L}\) は観測者からレンズ天体までの角径距離、\(D_{\rm S}\) は観測者からソース天体までの角径距離、\(D_{\rm LS}\) はレンズ天体からソース天体までの角径距離です。
角径距離については、観測対象が近傍の宇宙であれば通常の距離とみなして問題無く、マイクロレンズ現象の観測対象の範囲内であれば各天体間の距離と思って問題ありません。
この角度の見かけの大きさは、\(D_{\rm L}D_{\rm S}/D_{\rm LS}=10\,{\rm kpc}\) で、レンズ天体質量が太陽質量の時
\begin{align*}
\theta_{\rm E}=0.9\times10^{-3}\,{\rm arcsec}
\end{align*}
となります。
この角度は非常に小さいため地上の望遠鏡で分解するのは非常に困難ですが、重力マイクロレンズによる増光現象は捉えることができます。
アインシュタインリングの半径であるアインシュタイン半径 \(R_{\rm E}\) は、
\begin{align*}
R_{\rm E}=\theta_{\rm E}D_{\rm L}=\sqrt{\frac{4GM}{c^{2}}\frac{D_{\rm L}D_{\rm LS}}{D_{\rm S}}}
\end{align*}
と書くことができます。
天体が重力マイクロレンズによって増光している期間の典型的な長さ \(r_{\rm E}\) は、アインシュタイン半径を通過する時間で表すことができるため、視線方向に垂直な速度 \(v_{\perp}\) を使って
\begin{align*}
t_{\rm E}=\frac{R_{\rm E}}{v_{\perp}}=\frac{1}{v_{\perp}}\sqrt{\frac{4GM}{c^{2}}\frac{D_{\rm L}D_{\rm LS}}{D_{\rm S}}}
\end{align*}
と表せます。
式を見ると分かるように、重力マイクロレンズ現象による増光の継続時間 \(t_{\rm E}\) は、レンズ天体の質量 \(M\) が大きいほど長くなります。
また、レンズ天体やソース天体までの距離にも依存します。
さらに、天体の相対速度にも依存するため、これらの情報が全て縮退しています。
重力マイクロレンズによる増光率 \(A\) は、各天体を無限小の大きさを持つ点だと考えた場合、
\begin{align*}
A=\frac{u^{2}+2}{u\sqrt{u^{2}+4}}
\end{align*}
と表すことができます。
ここで、
\begin{align*}
u\equiv\frac{D_{\rm L}}{R_{\rm E}}\beta
\end{align*}
であり、\(\beta\) はレンズ天体-観測者-ソース天体が成す角度です。
単一天体による重力マイクロレンズ現象での増光は時間に対して対称な形状になり、また空間の歪みに起因する現象なので観測する波長による違いもありません。
増光率の式を見ると、\(u=0\) の時に増光率は無限大に発散しています。
\(u=0\) というのは \(\beta=0\) のことであり、すなわち地球とレンズ天体とソース天体が完全に一直線に並んだ時は増光が無限大に発散するという特異点がある事を示しています。
実際には天体の大きさは点ではなく有限の大きさを持っているため、これを考慮すると無限大には発散しません。
この効果は有限ソース効果 (finite source effect) と呼ばれていて、有限ソース効果を精度よく検出出来れば天体の移動速度が分かり、縮退していた物理量をそれぞれ求めることができる場合があります。
重力マイクロレンズでの観測プロジェクトでは、銀河系内にあると思われる MACHO の検出が試みられました。
その結果、数々のレンズイベントの検出に成功しています。
しかし観測結果から推定した MACHO の総総量は、銀河系内の見えない質量を説明するのには不十分である事が分かっています。
観測プロジェクトによって具体的な数値は異なりますが、MACHO の総質量は銀河系内の天体の運動を説明するために必要な質量のうち、最大でも 20% 程度にしかならないと考えられています。
また宇宙の構造形成という観点からも、ダークマターの主成分は MACHO のような見えない天体ではなく、未知の素粒子であることが要請されています。
そのため MACHO がダークマターの主成分である可能性は無くなりましたが、銀河系内の見えない質量のうち一定量を担っている事は判明したため、銀河系内におけるダークマターの総量に関する研究には重要な結果です。
MACHO の典型的な質量は、0.5 太陽質量程度だと考えられています。
MACHO の正体ははっきりしていませんが、暗くて観測にかからない天体としては、ブラックホール、中性子星、白色矮星、赤色矮星、褐色矮星、惑星や惑星質量天体などが考えられています。
これらの天体がどの程度存在するのか、銀河系内の見えない質量のうちどの程度を担っているのかについての詳細な数値は、今後の重力マイクロレンズ現象の更なる観測で明らかになると期待されています。
一方、レンズ天体が連星になっている場合は、重力マイクロレンズ現象による増光は非常に複雑なものになります。
レンズ天体が単一の場合は、増光率が無限大に発散する特異点があり、それは観測者とレンズ天体、ソース天体が一直線に並んだ時でした。
しかしレンズ天体が連星の場合は、増光率が無限大に発散する場所が連星間に菱形やくさび形のような複雑な形の線で連なった、"特異線" が存在します。
この増光率が無限大に発散する線の事を、caustics と呼びます。
日本語では「焦線」と呼ばれる場合が多いです。
観測者と焦線、ソース天体が一直線に重なった時に、マイクロレンズイベントによる増光率が無限大になります (実際には天体の大きさは有限なので無限大には発散しない)。
そのため単一の天体によるレンズ効果とは異なり、重力マイクロレンズによる増光曲線は複雑な形状になります。
単調な曲線の上に、M 字型の特徴的な曲線が乗ったような形状になる事が多いです。
レンズ天体が惑星を持っている場合、レンズ天体と惑星の連星と見なすことができます。
そのため連星レンズ天体による重力マイクロレンズが発生する可能性があることになります。
重力マイクロレンズ法は、この現象を観測することによってレンズ天体に付随している惑星を発見しようと言う手法です。
このような場合、中心星の重力マイクロレンズによる光度曲線に、惑星が存在することによって起きる短く鋭い光度変化が観測されます。
恒星による重力マイクロレンズに加えて惑星による重力マイクロレンズ効果が発生する、という説明がされる場合がありますが、惑星重力のマイクロレンズ現象が単純に足し算されているわけではない事には注意が必要です。
恒星と惑星の双方の影響による焦線と背景星が重なれば、背景星の増光率は一気に跳ね上がるため、恒星の重力単体による増光よりも、それに乗っている M 字型の曲線の方が増光率が大きい場合があります。
実際の光度曲線の一例は、「重力マイクロレンズによる地球質量の5.5倍の
低温の惑星の発見」(名古屋大学 太陽地球環境研究所) などに載っています。
重力マイクロレンズ法で観測しているのは、背景にあるソース天体の明るさの変化です。
そのため、天体の明るさとその変化を精密に測定する測光観測を行うことになります。
この点において、恒星の明るさの微小な変動を捉えるのが目的であるトランジット法と似ています。
ただし、トランジット法で見ているのは惑星を持っている恒星の光度変化であるのに対して、重力マイクロレンズ法で見ているのは背景の星の光度変化であるという大きな違いがあります。
重力マイクロレンズが発生するためには、ソース天体とレンズ天体と観測者がほぼ一直線に並ぶ必要があります。
しかしそのような位置関係になる確率は低く、銀河の中心方向を見た場合でも確率は 100 万分の 1 程度となります。
さらにレンズ天体が必ず惑星を持っているとは限りません。
また、惑星を持っていたとしても必ず光度曲線に特徴的な構造が現れるとは限らず、背景のソース天体とレンズ天体の位置関係によって検出が出来ない場合もあります。
そのため、広い範囲の大量の星を同時に観測して光度変化をモニターする必要があります。
この点もトランジット法による探査と似ています。
観測のためには比較的大型の望遠鏡を用い、広い範囲の多数の恒星を同時にモニターします。
レンズイベントは、ソース天体とレンズ天体がほぼ一直線に並んだ際に発生しますが、一度横切ってレンズイベントを起こした後、同じレンズ天体が再び別のソース天体の手前を通過してレンズイベントを起こす確率は非常に稀です。
つまり、重力マイクロレンズ現象は事実上追観測が不可能であるという特徴があります。
そのため、一度増光の開始が観測された場合は世界各地の観測所や観測グループにアラートを出し、世界各地の複数の観測所で高頻度のフォローアップ観測を行います。
これによって観測の回数を確保し、ある観測地点で観測ができなくなった場合 (時間帯の問題や天候の問題など) でも別の観測地点からの観測データを確保出来ることになります。
先述の通り、重力マイクロレンズ法で天体を検出するには、ソース天体とレンズ天体、地球がほぼ一直線になって重力レンズ現象が起きる必要があります。
多くの天体が存在する方向を観測すれば天体が重なる確率も高くなるため、背景星が多い方向を中心に観測が行われます。
広視野の地上望遠鏡を用い、銀河系の中心に近い方向をメインに探査しています。
重力マイクロレンズ法の特徴は、遠方の天体の現象も捉えることができるという点です。
視線速度法では分光観測を行うために比較的近傍の明るい恒星を観測対象として選択し、トランジット法でも視線速度法での追観測のためにはやはり中心星が明るい方が有利です。
しかし重力マイクロレンズの場合はレンズ天体の明るさは検出確率には関係ないため、遠方に存在するため暗い恒星が持つ惑星の検出も可能としています。
原理的には銀河系内の天体に限らず、銀河系外の天体が持つ惑星の発見も可能です。
中心星 (レンズ天体) の明るさに無関係なので、絶対数が多い恒星での検出確率が高いということになります。
恒星は一般に低質量の方が個数が多いため、最も数が多い M 型主系列星 (赤色矮星) まわりの惑星が発見しやすくなります。
視線速度法では、暗い M 型は観測には向かないため発見しづらくなることとは対照的です。
また重力マイクロレンズ法は、中心星から 1 AU から数 AU 程度離れた軌道を持つ惑星に感度があります。
さらに、低質量の惑星であっても検出が可能という特徴もあります。
視線速度法やトランジット法では、中心星から離れた軌道を持つ惑星は観測期間や観測精度、検出可能性などの観点から発見しづらいというバイアスがあります。
惑星質量に関しても、視線速度法では軽い惑星は発見しづらく、トランジット法でも半径の小さい惑星の検出は高精度が必要とされます。
重力マイクロレンズ法は、視線速度法やトランジット法が苦手としているパラメータの系外惑星に対して感度があるため、これらの発見方法とは相補的です。
逆に惑星の軌道長半径が小さく恒星に近い場合は発見しづらくなります。
また軌道長半径が大き過ぎると惑星がいることによる重力レンズ効果が検出しづらくなるため、結果として 1 - 5 AU 程度の軌道長半径を持つ惑星を発見しやすいことになります。
上の図は、発見されている系外惑星のうち重力マイクロレンズ法によって発見されたものを赤い点で示したものです。
横軸は太陽系からの距離、縦軸は惑星の軌道長半径を表しています。
縦軸を見ると、重力マイクロレンズ法で発見されている惑星は 1 AU より遠方を公転する惑星であることが分かります。
また横軸を見ると、太陽系から 500 光年以上、場合によっては数千光年以上の遠方にある遠い恒星における惑星の発見例があることが分かります。
グラフには全ての惑星はプロットされていませんが、重力マイクロレンズ法によって発見されている系外惑星には、太陽系から非常に離れた位置にあるものが多く発見されています。
例えば、太陽系から MOA 2011-BLG-293Lb までの推定距離は 7720 パーセク、およそ 25200 光年もの距離があります。
グラフからも分かるように、これまでに発見されている惑星までの距離は数百光年程度のものが一番多く、数千光年を超えるような遠方にあるものは少なくなります。
距離がある程度詳しく分かっている惑星系のうち、7500 光年 (2300 パーセク) より遠方にある惑星は 53 個ありますが、そのうち 46 個が重力マイクロレンズ法で発見された惑星です (個数は 2018 年 5 月現在、データは NASA Exoplanet Archive より。残りの 6 個はトランジット法、1 個が視線速度法)。
重力マイクロレンズ法を用いた惑星の発見を行っているプロジェクトは、元々は銀河系内のダークマター候補である MACHO を検出するための手法として始まったものです。
アメリカ・オーストラリアによる MACHO グループと、フランスの EROS グループが観測を始めました。
重力マイクロレンズ法による MACHO 天体の検出自体は、1993 年に MACHO グループによって初めて成功し、ほぼ同時期に EROS グループによっても発見されています。
観測開始は 1990 年であり、初めての検出まで 3 年近くを要したことになります。
重力マイクロレンズ法を用いた系外惑星の初めての発見報告は、2004 年 4 月に行われました。
ポーランドを中心とした観測プロジェクトである OGLE (Optical Gravitational Lensing Experiment) グループと、日本やニュージーランドを中心とした MOA (Microlensing Observations in Astrophysics) グループによる観測によって発見されています。
両グループによる発見だったため、発見された天体は両方の名称が付けられた OGLE-2003-BLG-235Lb/MOA-2003-BLG-53Lb (あるいはシンプルにOGLE235-MOA53b) と呼ばれています。
名前に "2003" と付いている通り、レンズイベント自体は 2003 年の 6 月下旬から観測されました。
この惑星は軌道長半径が 5 AU 程度、質量が 2.6 木星質量程度であり、中心星から比較的遠方に位置する巨大ガス惑星だと推定されています。
中心星の OGLE235-MOA53 は太陽系から 19000 光年ほど遠方にあり、実視等級は 19.7 等と非常に暗いため、視線速度法などの発見方法では惑星の検出は困難です。
2005 年 8 月には、発見当時としては最小の質量を持つ系外惑星である OGLE-2005-BLG-390Lb も発見されています。
OGLE によって最初にレンズイベントが報告され、MOA を含む多くのグループによってフォローアップ観測されています。
この惑星の推定質量は地球の 5.5 倍程度で、軌道長半径の推定は 2 - 3 AU 程度と見積もられています。
発見当時としては最小の質量を持つ惑星であり、太陽系の海王星の質量よりも小さく、地球のような岩石惑星である可能性が高いと考えられました。
また、当時発見されていた系外惑星はほとんどがホットジュピターのような中心星に極めて近い巨大ガス惑星だったため、低質量で中心星から距離がある惑星としても初めての発見例となっています。
この惑星の発見は、重力マイクロレンズ法が比較的大きな軌道長半径を持ち、なおかつ軽い惑星にも感度がある事を示す良い例です。
重力マイクロレンズ法自体は、単体の軽い天体に対しても感度があります。
そのため、恒星とその周りを回る惑星だけではなく、惑星程度の質量が単独で存在している場合も、重力マイクロレンズ法を用いると検出出来ることがあります。
そのほかの手法では、そもそもそのような暗い天体を直接観測する事は非常に困難ですが (不可能では無い)、重力マイクロレンズ法はレンズ天体の明るさは無関係である事から検出は十分に可能となります。
恒星などの周りを回っておらず、単独で存在する惑星程度の質量を持つ天体は浮遊惑星と呼ばれることがあります。
正式な用語や定義は定まっておらず、日本語では「浮遊惑星」や「自由浮遊惑星」、「星間惑星」、より一般的に「惑星質量天体」などと呼ばれる事があります。
英語の場合は "rogue planet (rogue = 放浪者)" や "free-floating planet"、"nomad planet (nomad = 遊牧民、放浪者)"、"interstellar planet"、"orphan planet (orphan = 孤児)"、"planetary-mass object" などの呼び名があります。
単独の天体が起こす重力マイクロレンズによる増光時間は、先述の通り
\begin{align*}
t_{\rm E}=\frac{R_{\rm E}}{v_{\perp}}=\frac{1}{v_{\perp}}\sqrt{\frac{4GM}{c^{2}}\frac{D_{\rm L}D_{\rm LS}}{D_{\rm S}}}
\end{align*}
と表すことができます。
一般には天体の相対的な速度と各天体間の距離、レンズ天体の質量の情報が全て重なって縮退してしまいますが、別の観測から距離を求めたり、マイクロレンズの高次効果から縮退を解いてそれぞれの情報を取り出すことができる場合があります。
また、相対速度については銀河系内の天体のモデルを適用して推定する事も出来ます。
そのため、増光の継続時間とレンズ天体の質量をある程度結びつける事が可能になります。
典型的には、太陽質量程度の天体によるレンズイベントの継続時間は 1ヶ月から数ヶ月程度、褐色矮星程度の質量 (13 木星質量以上) の場合は 1ヶ月未満、木星程度の質量の場合は数日、地球程度の質量の場合は 1 日未満 (数時間) となります (参考に、25 太陽質量のブラックホールの場合は増光期間は 2 年程度)。
そのため、継続時間が数日程度やそれ以下の短いレンズイベントが観測出来た場合は、恒星の周りを回っていない単独の惑星、いわゆる "浮遊惑星" によるレンズイベントだったという事が予想されます。
2011 年までの重力マイクロレンズ法を用いた観測から、銀河系内には大量の "浮遊惑星" が存在するという研究結果が発表されました。
この研究では、観測される頻度から推定した銀河系内における浮遊惑星の個数は、銀河系内に存在する恒星の少なくとも同程度から 2 倍程度 (= 数千億個のオーダー) とされています。
この発見に関する詳細は「浮遊惑星という新たな系外惑星が多く存在していることを発見」(名古屋大学 太陽地球環境研究所) や「惑星の多くは一人ぼっち?主星を持たない系外惑星を発見」(AstroArts) を参考にしてください。
ただし、上記の研究結果に関しては、後に否定的な見解も提示されています。
同じく重力マイクロレンズによって観測された低質量の天体の存在頻度から、木星程度の質量を持つ自由浮遊惑星の銀河系内の個数は、最大でも恒星の個数の 1/4 程度、もっともらしい値としては 1/20 程度に留まるという推定結果が 2017 年に出されています。
2014 年初頭には、重力マイクロレンズ法を用いた系外衛星 (exomoon) 候補の検出の報告も行われています (レンズイベント自体は 2011 年 6 月に発生)。
MOA-2011-BLG-262L というレンズイベントでは、主星による増光と、伴星を伴っていることによる増光が観測されました。
このレンズイベントによる増光を解析した結果、中心星の MOA-2011-BLG-262L は惑星質量の天体 (いわゆる浮遊惑星) で、なおかつ地球より軽い伴星を持っている可能性があるという事が判明しました。
これは、系外衛星候補の初発見例となります。
ただし、浮遊惑星を一般的な惑星と見なして良いのかどうか、また浮遊惑星の周囲を公転する天体を衛星と見なして良いのかという点は議論の分かれる所であり、はっきりとした結論はまだ出されていません。
このレンズイベントの解析の結果、もっともらしい値は、中心星 (MOA-2011-BLG-262L) が 3.2 木星質量、伴星 (MOA-2011-BLG-262Lb) が 0.47 地球質量で、伴星の軌道長半径が 0.13 AU、太陽系からの距離は約 1800 光年というものです。
これが正しければ、木星の数倍の浮遊惑星の周りを回る地球の半分程度の質量の衛星を検出した、ということになります。
しかし異なるモデルでの解析の場合は、中心星が 0.11 太陽質量の恒星、伴星は 17 地球質量で、伴星の軌道長半径が 0.95 AU、太陽系からの距離は 23000 光年となります。
重力マイクロレンズ法では距離や速度、質量の情報が縮退してしまうため、このように質量が確定出来ない場合がしばしばあります。
重力マイクロレンズのレンズイベントは一度限りの現象なので、この天体を追観測して質量などのパラメータを確定させる事は事実上不可能です。
そのため "候補" のままであり、系外衛星の初発見例にもなりませんが、このような天体であっても重力マイクロレンズ法では検出が可能だという事を示す好例です。
先述の通り、重力マイクロレンズ法による系外惑星探査を行っている二大プロジェクトは、OGLE グループと MOA グループです。
共に銀河系の中心のバルジ方向の多数の天体を観測し、いつ起きるか全く予測の付かないレンズイベントの発生を監視しています。
広い範囲の多くの恒星を同時に観測するためには大きな望遠鏡の大型の CCD が必要になるため、両者ともに大型の望遠鏡を使用しています。
OGLE はチリのラスカンパナス天文台 (Las Campanas Observatory) にある 1.3 メートルの望遠鏡を、MOA はニュージーランドのマウントジョン天文台 (Mount John University Observatory) にある 1.8 メートルの望遠鏡を使用して観測を行っています。
この 2 つのプロジェクトは競合しつつ協力関係にもあります。
いずれかの観測でレンズイベントの兆候が見られた場合はアラートを出し、協力して観測を継続します。
アラートは世界中のそのほかの観測所にも流され、複数のフォローアップ観測が行われます。
レンズイベントの兆候が見られた天体のみをフォローアップ観測する場合は、大型の CCD でなくても観測は可能です。
また、2015 年 2 月から稼働した重力マイクロレンズによる系外惑星探査プロジェクトとして、Korea Microlensing Telescope Network (KMTNet) があります。
これは名前の通り、韓国の天文学者が中心となって始められたプロジェクトです。
KMTNet では、チリのセロ・トロロ汎米天文台 (Cerro Tololo Inter-American Observatory、南アフリカの南アフリカ天文台 (South African Astronomical Observatory、オーストラリアのサイディング・スプリング天文台 (Siding Spring Observatory) の 3 箇所にある 1.6 m 望遠鏡を用いて、重力マイクロレンズイベントの探査を行っていて、2015 年 7 月に初めての系外惑星を検出しています。
このプロジェクトも、OGLE や MOA とは競合しつつ協力関係にあります。
最近では、地上の重力マイクロレンズネットワークと連携して、スピッツァー宇宙望遠鏡を用いた宇宙空間からの赤外線での重力マイクロレンズ観測も行われています。
地上から可視光で、宇宙空間から赤外線で重力マイクロレンズを継続的に観測することによって、これまでは発見しづらかった惑星の検出や、決定しづらかった物理パラメータの決定などが行えるようになっています。
将来的な重力マイクロレンズ計画として、宇宙望遠鏡を用いて重力マイクロレンズによる惑星探査を行うものもあります。
代表例が、直接撮像の将来計画でも出てきた、NASA が進めている赤外線宇宙望遠鏡である WFIRST (Wide-Field Infrared Survey Telescope) の計画です。
WFIRST の主要な目的はダークエネルギーに関する観測 (バリオン音響振動や弱い重力レンズの観測など) ですが、赤外線領域での重力マイクロレンズ法を用いた惑星探査も目的の一つとなっています。
また、コロナグラフを用いて系外惑星を直接撮像することも WFIRST の目的に含まれています。
宇宙空間からの観測の場合は天候に左右されず、観測可能な範囲も大幅に広くなりますが、一度限りの検出であるという点は変わりません。
単体のレンズイベントの場合は、例えば増光の継続時間は天体の速度や各天体間の距離、レンズ天体の質量の情報が縮退するためそのままではそれぞれの情報をバラバラに取り出すことはできません。
また重力マイクロレンズによる増光率も、レンズ天体までの距離、アインシュタイン半径、レンズ天体-観測者-ソース天体の成す角度に依存するため、やはり情報は縮退します。
しかし増光率が大きい際に現れる有限ソース効果や、地球の公転運動に伴う視差の影響が表れた場合 (パララックス効果)、連星によるレンズの効果などが観測された場合、あるいは恒星の光を検出出来る場合は縮退を解き、天体の物理量を求める事が出来る場合があります。
このような場合は中心星の質量が決まり、中心星と伴星の質量比が決まるため、惑星の質量も判明することになります。
また同じく光度曲線の解析から、中心星と惑星の距離も求めることができます。
直接求めることができるのは両者の距離とアインシュタイン半径の比ですが、中心星に関する物理量が判明すれば中心星と惑星の距離を計算する事が可能になります。
ただし、惑星の具体的な軌道要素を決定する事は困難です。
実質的に見ているのはスナップショットになるため、例えば惑星の軌道が楕円軌道であり、遠点付近に惑星がいる時にレンズイベントが発生した場合は実際の軌道長半径よりも大きな値になります。
また、一般に質量や軌道半径の決定精度は、視線速度法やトランジット法に比べると誤差が大きくなります。
単一天体による重力マイクロレンズ
連星レンズ天体による重力マイクロレンズ
重力マイクロレンズ法のための技術
重力マイクロレンズ法のターゲット

発見されている系外惑星を、横軸を太陽系から恒星までの距離 (単位は光年) に取り、縦軸を惑星の軌道長半径 (単位は AU) に取ってプロットしたもの。両軸ともに対数スケール。赤い点が重力マイクロレンズ法によって発見された惑星です。画像は Exoplanet Orbit Database より。2014 年までのグラフはこちら重力マイクロレンズ法による発見
OGLE-2003-BLG-235Lb/MOA-2003-BLG-53Lb
OGLE-2005-BLG-390Lb
"浮遊惑星"
系外衛星候補の発見
重力マイクロレンズ法による観測
主な観測
将来的な観測
重力マイクロレンズ法で分かる事
{kind=link}
| 検出に有利 | 軌道長半径が比較的大きい (1 - 5 AU) |
| 検出に不利 | 軌道長半径が小さい (主星の増光に埋もれるため) |
| 得られる情報 | 主星と惑星の質量比 |
| 主星と惑星の距離 | |
| その他 | 中心星の型によらず検出可 (中心星が暗く遠方であっても検出可) |
| 軽い惑星に対しても十分な感度がある | |
| "浮遊惑星" などの検出も可 | |
| 追観測は事実上不可能 | |
| 一般に軌道要素は決定出来ない |
パルサータイミング法
パルサータイミング法 (pulsar timing) は、パルサーからの電磁波の周期の変動から惑星の存在を検出する方法です。 惑星がパルサーに与える影響をパルサーが放出しているパルスのタイミングから検出し、間接的に惑星の存在を知る方法です。
現在までに発見されている系外惑星は、ほとんどは太陽のような恒星 (主系列星) の周りを公転しています。 しかし初めて存在が確認された系外惑星は、このパルサータイミング法で発見された、パルサーの周囲を公転する惑星でした。 パルサー周りを回る惑星の事を、パルサー惑星 (pulsar planet) と呼びます。
パルサータイミング法の物理
パルサー (pulsar) は、極めて規則正しい周期の電磁波のパルスを放出している天体です。 多くの場合、パルスの周期は数秒から数ミリ秒といった短い間隔になっています。 パルサーが発見された当初は、放出しているパルスの周期があまりに正確である事から、自然現象によるものでは無く人工的な、つまり何らかの知的生命体が発している信号ではないかという説もあったほどです。 実際にはこの正確な短周期のパルスは自然現象でも説明が出来、高速で回転する中性子星がパルサーの正体だと考えられています。
中性子星は、太陽の 8 倍以上の質量を持つ天体が超新星爆発を起こした後に残される、高密度のコンパクトな天体です。 中性子星は一般に自転周期が非常に短く高速で回転していて、また磁場の磁極の方向にはビーム状に電磁波を放出していますが、中性子星の自転軸と中性子星の持つ磁場の軸がずれている場合はビームの方向が自転に伴って振り回されることになります。 その動きに伴ってビームの方向が地球を向いた瞬間に、強い電磁波のパルス信号として観測することができます。 つまり、パルサーからのパルスは中性子星の自転を反映しているため、非常に短周期で正確な信号として観測出来ることになります。 なお自転軸と磁場の軸がずれていることは珍しい事ではなく、地球も自転軸と磁場の軸は一致していません。
パルサーの周囲を別の天体が公転している場合は、その天体の公転運動がパルサーの動きに影響を及ぼし、ドップラー効果によってパルサーからのパルス周期に変動が発生します。
このとき、パルサーの周囲を公転している天体が惑星質量程度の小質量である場合であってもパルス周期の変動は十分検出可能な大きさになるため、パルサー周りの惑星を検出する事が可能になります。
パルサーからのパルスのタイミングの変動から見えない伴星を探る試みは、パルサーの存在が明らかになった直後から行われていました。
初めてパルサーが発見されたのは 1967 年の事で、この時発見されたパルサーは現在では PSR B1919+21 という名前で呼ばれています。
初めてパルサーが発見された後も、パルサーの発見は続きました。
1968 年には、超新星残骸であるかに星雲の中心部分に、かにパルサー (Crab Pulsar) が発見されました。
かに星雲は 1054 年に観測された超新星によって出来た超新星残骸で、星雲そのものは 1731 年に発見されていました。
かにパルサーからのパルスには特徴的な変動があり、1969 年に David W. Richards らによってかにパルサーの周りに惑星程度の質量を持った天体が存在する可能性が示されました。
その後も 1970 年に F. Curtis Michel によって惑星の軌道要素が示され、1971 年には M.J. Rees らによってかにパルサーの周りには複数の惑星が存在するという説も出されました。
しかしこれらは確認されておらず、パルサータイミング法での発見例とは見なされていません。
1991 年 7 月には、Andrew G. Lyne らによって PSR B1829−10 というパルサーの周期に特徴的な変動が見られたとの報告が上がりました。
彼らの報告によると、PSR B1829−10 からのパルスの変動周期は 184.4 日とほぼ半年で、PSR B1829−10 の質量を 1.4 太陽質量とした場合、変動を引き起こしている伴星の質量は 10.2 地球質量と推定されました。
視線速度法での観測と同様に天球面上に投影された動きを観測していることになるため、パルサータイミング法で分かるのは惑星の最小質量になります。
最小質量が 10.2 地球質量ということは、真の質量が褐色矮星の下限質量を超える確率は非常に低いと考えることができます。
Lyne らの報告では、軌道の分布をランダムだと仮定した場合、伴星の質量が 12 地球質量以下である可能性は 50% 程度、木星質量 (およそ 300 地球質量) を超える可能性は 0.05% としています。
また、軌道長半径は 0.710 AU と計算しました。
この発見が本当であれば、太陽系外惑星の初めての発見例となるはずでした。
しかしこの報告にはデータの扱いに間違いがあった事が直後に判明し、彼らが計算をやり直したところ、惑星によるとされていたシグナルの変動は消えてしまいました。
そのため、彼らは 1992 年 1 月に惑星発見報告を撤回することとなりました。
彼らの間違いは、地球の軌道の離心率による影響を観測データから差し引くことを忘れていた事でした。
地球の軌道はわずかに円からずれた楕円軌道であり、離心率は 0.0167 程度の値を持ちます。
パルサーそのものの変動を取り出すためには、地球の公転運動によって引き起こされる変動を取り除かなければなりませんが、彼らは離心率を考慮していなかったため地球の運動による影響を完全に取り除けていませんでした。
そのため、地球の公転周期のほぼ半分の周期の変動が残ってしまい、それをパルサー周りの惑星によるものと誤認したのです。
このような、地球の公転運動や自転運動、あるいは太陽系自体の運動が観測結果に影響を及ぼす事はしばしばあり、これらの影響を正確に差し引いたかどうかで大幅に結果を間違う事もあります。
Lyne は惑星発見の撤回報告をアメリカ天文学会の会議で行い、このとき彼の同僚達は Lyne の誠実さと公衆の面前で過ちを認める勇気に対してスタンディングオベーションを送ったと言われています。
Lyne らが発見報告を撤回した直後の 1992 年 1 月、Aleksander Wolszczan と Dale Frail によって PSR B1257+12 というパルサーの周りに惑星を発見したという報告が上がりました。
彼らの報告によると、このパルサーの周りには軌道周期が 66.6 日と 98.2 日、最小質量が 3.4 地球質量と 2.8 地球質量の 2 つの惑星が公転しているとされました。
それぞれ、PSR B1257+12 B、PSR B1257+12 C と名前が付いています。
この 2 つが、パルサータイミング法を用いた最初の系外惑星の発見例です。
必然的に、パルサー周りに発見された初めての惑星ということになります。
彼らの報告の直前に上述の PSR B1829−10 でのパルサー惑星の発見の撤回があったため、当初はこのパルサー周りの惑星発見報告も疑問視されていました。
また、パルサー周りに本当に惑星が存在することができるのかという疑問もありました。
しかしその後の観測によって、1994 年にこの 2 つの惑星の存在は証明され、さらに同じ観測によって 3 つ目の惑星である PSR B1257+12 A の発見も報告されました。
この報告によると、3 つ目の天体は発見されていた 2 つより内側を公転し、軌道周期が 25.34 日、最小質量が 0.015 地球質量と推定されています。
これは月の質量よりわずかに重い程度 (月は 0.0123 地球質量) であり、PSR B1257+12 A はこれまで発見されている系外惑星の中で最も軽い惑星です。
後の 2003 年の研究では、PSR B1257+12 A の推定質量は 0.020 地球質量と見積もられていますが、この値も系外惑星の中では最小です (2018 年 5 月現在)。
一般的には太陽系外惑星の初発見例は、1995 年のペガスス座51番星b を指す事が多いです。
ペガスス座51番星b は太陽のような主系列星の周りを公転していて、"太陽のような恒星の周りを公転する惑星" という意味では初発見例はペガスス座51番星b となります。
しかし中心星のタイプに言及せず、単にある天体の周囲を公転する惑星の初発見と言った場合は、パルサーである PSR B1257+12 の周りに 1992 年に発見された 2 つの惑星の方が先です。
また,1988 年に視線速度法を用いた発見報告はありましたが後に撤回され、1989 年にも視線速度法で発見報告がありましたが推定質量が大きいため、どちらも系外惑星の初発見とは見なされていません。
そのため 1992 年の PSR B1257+12 B, C の発見をもって、太陽系外惑星の初発見例とする場合もあります。
さらに、PSR B1257+12 の系は当初 2 つ (後に計 3 つ) の惑星が発見されたため、複数の惑星が存在する多重惑星系の初発見例でもあります。
なお、これらの惑星の名称はそのほかの一般的な惑星の名称とは異なる命名をされています。
通常は系外惑星は発見された順に b, c, d, ...と中心星の名称に小文字のアルファベットを付記しますが、PSR B1257+12 まわりの惑星はその慣習から外れています。
初めに発見された 2 つには内側から PSR B1257+12 B、PSR B1257+12 C と名前が付けられ、後に発見された一番内側の惑星には PSR B1257+12 A と名前が付けられています。
当時はまだ系外惑星の命名の慣習 (b, c, d, ...と付ける) が存在しておらず、連星の命名法をそのまま流用して名前が付けられたものが現在でも使用されています。
パルサータイミング法では、パルサーからの非常に正確な周期のパルスがわずかに変動するのを捉えることによって惑星を検出します。
観測されるパルサーのパルス周期に影響を及ぼすものは、パルサー自体の影響以外にも地球自身の運動なども含めいくつかありますが、それらを取り除いた後にまだ周期的な変動が残っていた場合は、パルサー惑星による影響だと推測することができます。
パルサーの周期の変動は惑星の公転周期を反映したものになるため、惑星の公転周期は直接求めることができます。
中心星の質量が判明すれば、公転周期から惑星の軌道長半径を計算する事も可能です。
またパルス周期の変動はドップラーシフトによるものなので、視線速度法による惑星の検出と同様に、周期の変動の振幅から惑星の最小質量を計算する事も可能です。
さらに周期の変動の様子を解析する事で、軌道離心率を推定する事が出来る場合もあります。
パルサータイミング法で見ているのはパルスの周期変動ですが、この変動の振幅は惑星の質量に対して非常に敏感なため、非常に軽い惑星による影響であっても検出が可能です。
現在の最先端の視線速度法による観測精度と同等か、それを上回る精度での観測が、現在より 20 年以上前の観測で可能でした。
視線速度法と同じく、軌道傾斜角が分からないため質量も最小質量しか分かりません。
一般に軌道傾斜角を求めるのは困難なので真の質量を求めるのも困難ですが、場合によっては観測とモデルから軌道傾斜角を推定出来る場合があります。
例えば初発見例である PSR B1257+12 B, C の 2 つについては軌道傾斜角が推定されていて、それを元に真の質量の推定値も計算されています。
パルサータイミング法による発見
かにパルサー (未確認)
PSR B1829−10 (誤検出)
PSR B1257+12 B, C
パルサータイミング法で分かること
| 得られる情報 | 惑星の公転周期、軌道長半径 |
| 惑星の軌道離心率 | |
| 惑星の最小質量 | |
| その他 | パルサー (中性子星) まわりの惑星のみ検出可 |
| 月程度の極めて軽い天体も検出可 | |
| 真の質量は一般には決定不可 |
パルサー惑星について
通常「惑星」と言った場合は、太陽のような恒星の周囲を公転している天体を想定する場合が多いですが、パルサー惑星はその名の通りパルサーの周囲を公転している惑星です。 パルサーの正体は中性子星であり、中性子星は太陽の 8 倍より重い恒星が進化の最終段階に起こす超新星爆発によって形成される天体です。 そのため、パルサー惑星は通常の恒星の周りの惑星とは異なる性質を持つ可能性が高いと考えられています。
例えば、初めて発見されたパルサー惑星である PSR B1257+12 A, B, C は、軌道長半径がそれぞれ 0.19 AU、0.36 AU、0.46 AU となっています。 この距離では、超新星爆発を起こす前の巨星段階で恒星に飲み込まれてしまう可能性が高いことや、超新星爆発の衝撃を生き延びる事が困難な事から、初めからこの位置に存在したわけではない可能性があります。 そのためこれらのパルサー惑星は、超新星爆発を起こした後の超新星残骸から形成された天体だろうと考えられています。 太陽系のような通常の惑星系は、原始星の周りに形成された原始惑星系円盤の中で形成されます。 パルサー惑星は、超新星爆発後にパルサー周りに形成された、"第二世代の原始惑星系円盤" の中で形成されたのだろう、ということです。
2006 年 4 月には、マグネターである 4U 0142+61 の周囲に星周円盤が発見されました。 マグネターとは、標準的な中性子星よりも数桁強い磁場を持っている中性子星を指す名称です。 このマグネターはおよそ 10 万年前に超新星爆発によって形成されたと考えられていて、周囲にある円盤は 10 地球質量程度と推定されています。 4U 0142+61 まわりの円盤では "惑星形成" が起きている可能性があり、パルサーまわりの惑星は特異ではない事を示す例となるかもしれません。
発見されているパルサー惑星の個数は少なく、2017 年 6 月の段階では 3 つの惑星系に合計 5 つしか発見されていません (発見報告があったが未確定のものは除く)。 PSR B1257+12 のまわりに発見された A, B, C の 3 つ、PSR B1620-26 まわりに発見された PSR B1620-26b (最初の発見報告は 1993 年、存在が確認されたのは 2003 年)、PSR J1719-1438 のまわりに発見された PSR J1719-1438b (2011 年発見) の計 5 つです。 これらはそれぞれ異なる形成過程を経ていると考えられています。
PSR B1257+12 まわりの 3 つの惑星は、先述の通り超新星爆発後の超新星残骸から円盤ができ、その円盤内で形成された惑星だと考えられています。 先述のマグネター周りの星周円盤が発見されたことから、このような通常の惑星が作られるようなメカニズムでパルサー周りに惑星が形成される可能性は十分あります。
PSR B1620-26b は連星を公転する惑星であり、パルサーの PSR B1620-26 と白色矮星 WD B1620-26 の連星の周囲を公転しています。 詳しい形成過程は分かっていませんが、かつては通常の恒星の周りで通常の惑星として形成された後、中性子星の連星に接近して捕獲された結果現在の姿になったと予想されています。 惑星が他の天体に捕獲されるような接近が発生する確率は銀河系内では通常極めて低いですが、PSR B1620-26 があるのは恒星の個数密度が非常に高い球状星団の内部であり、球状星団の中心部分ではこのような接近やあるいは衝突は発生し得ると考えられています。
PSR J1719-1438b は、質量は木星程度ですが推定半径は木星の半分以下と、非常に高密度の天体であることがわかっています。 この天体は元々は恒星であり、主星のパルサーに質量の大部分を奪われてしまった結果、現在の惑星程度の質量になったのだと考えられています。
このように、パルサー惑星の形成過程としては、
- 超新星後にパルサー周りの円盤内で惑星形成が起きる
- 近接遭遇により別の系の惑星を捕獲する
- 元々恒星だった天体が質量を奪われ惑星質量程度になる
その他の発見方法
Transit Timing Variation 法 (TTV)
Transit Timing Variation 法の概要
惑星が恒星の手前を通過する事で、恒星からの光が遮られて減光する現象を捉えるものがトランジット法でした。 あるトランジット現象から、次のトランジット現象までの時間は、その惑星の軌道周期で決まります。 例えば惑星の公転周期が 10 日である場合は、10 日ごとにトランジットを起こすため、10 日おきにトランジットによる減光を観測出来ることになります。
しかし系に惑星が複数存在する場合は、複数の惑星の重力によって惑星の運動にわずかなずれが生じます。 そのため、このような場合は惑星のトランジットのタイミングに変動が生じる場合があります。 トランジット法では惑星の軌道周期を非常に精密に観測する事が出来るため、他の惑星の影響によるトランジットのタイミングの変動が捉えられることがあります。 この変動の幅や周期 (惑星の軌道周期ではなく、トランジットするタイミングが変動する周期) を測定することによって新たな惑星を発見する手法が、Transit Timing Variation 法 (TTV) です。「トランジット時刻変動」などと表される場合がありますが、まだ定着した日本語訳はありません。
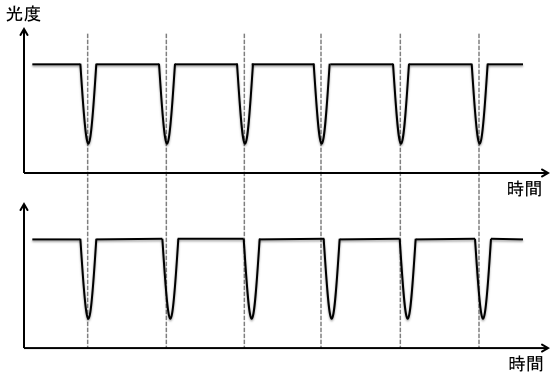
上に示したのは TTV の概略図です。
図中の上のグラフは、惑星が 1 個しかない系でのトランジットの様子を示しています。
この場合は、惑星の軌道周期の通りに同じタイミングでトランジットによる減光が発生します。
しかしこの系に別の惑星が存在する場合は、下のグラフのようにトランジットのタイミングに変動が生じます。
タイミングの変動は大きくなり続けるわけではなく、ある特定の周期を中心として振動するような変化になります。
ここの図では、トランジットのタイミングがやや遅れ、その後再び早くなる、という様子になっています。
下の図のような変動があった場合、トランジットを起こしている惑星の他にも惑星が存在するということが分かります。
ケプラー宇宙望遠鏡による観測で、多数のトランジット惑星が発見されています。
これらの観測により、トランジットのタイミングも非常に精密に決定する事が出来ているため、トランジットを起こしていない惑星による小さなトランジット時刻変動も捉える事が出来るようになって来ました。
TTV による惑星検出のアイデアは、2005 年に Agol らと、Holman & Murray によってそれぞれ独立に提案されました。
彼らの理論的な予測に基づき、既に発見されていたトランジット惑星のトランジット時刻の変動が精査されましたが、有意な TTV が見られなかったり、検出例はあっても誤検出だったという例がしばらく続きました。
TTV が明確に確認された初めての例は、ケプラー9b とケプラー9c の 2 つの惑星で、2010 年のことです。
この 2 つの惑星の発見自体はトランジット法によるものでしたが、両惑星のトランジットの時刻変動は、ケプラー9b はおよそ 20 分、ケプラー9c はおよそ 65 分という非常に大きな振幅のタイミングのずれがある事が判明しました。
なお、この 2 つの惑星は、複数の惑星がトランジットを起こしている初めての発見例でもあります。
一方、TTV によって発見された初めての系外惑星はケプラー19c で、2011 年に発見が報告されました。
ケプラー19b はトランジット法を用いて 2011 年に発見されましたが、そのトランジットのタイミングには微小なずれがあることも判明しました。
ケプラー28b のトランジット時刻の変動幅はおよそ 5 分、変動の周期は 316 日でした。
この観測結果から、ケプラー19b の外側を公転するケプラー19c が存在するということが分かっています。
その後も、ケプラー宇宙望遠鏡のデータの解析から複数の惑星が TTV によって発見されています。
また後述のように、TTV を用いて複数のトランジット惑星の質量推定も行われています。
トランジット時刻の変動幅は、トランジット惑星の軌道周期と軌道長半径、中心星の質量、未知の惑星の軌道長半径と質量でおおむね近似出来ます。
トランジット惑星と中心星の質量の情報が既知であるとすると、未知の惑星の軌道長半径と質量によって決まることになります。
実際に未知の惑星に関する物理量を求める際は、観測結果を最も上手く再現出来るようなパラメータを計算から探すという作業が必要になります。
Transit Timing Variation を用いることによって、トランジットを起こさないためトランジット法では発見出来ない惑星も発見することができます。
初発見例であるケプラー19c も、トランジットは起こさない惑星ですが、TTV 法を通じて存在が確認されました。
従って、TTV 法からは複数惑星系に対する多くの情報が得られることが期待されます。
また、TTV 法は新たな惑星の発見だけではなく、既にトランジット法で発見されている複数惑星系のパラメータを推定するのにも有用です。
複数の惑星がトランジットを起こしている系では、それぞれの惑星のトランジットのタイミングは微小に変動していることになります。
トランジット法そのものでは各惑星の質量は求めることが出来ず、視線速度法による追観測から質量を決定する必要がありますが、特に軽い惑星は視線速度法での検出が難しいという難点があります。
しかし TTV 法を用いることによって、各惑星の質量を決定する事が可能になります。
そのため、比較的軽く視線速度法による追観測が難しいトランジット惑星の質量の推定手段として用いられる場合があります。
例として、ケプラー11 の惑星系はこれまでに 6 つの惑星が発見されていますが、このうち一番外側を公転する惑星以外の 5 つでは 2011 年までに TTV が検出されています。
この TTV からケプラー11 の 6 つの惑星の質量が推定されており、これは TTV 法のみから惑星の質量が決定された初めての例です。
最近では、TTV は複数の惑星候補がトランジット法で検出されている系における、惑星の存在確認の手段としても使われています。
ケプラーなどのトランジット法によるサーベイでは,恒星の減光が多数検出されますが,その減光が本当に天体のトランジットによるものなのか (偽陽性ではないかどうか),またその場合にその天体が惑星なのかを確認するまでは,惑星によるトランジットとは確定できません.
トランジットシグナルが検出された後に視線速度法で追観測をして確認するという確認手段が主流でしたが,惑星の質量が軽いなど条件が悪い場合は視線速度法では十分な精度が得られないこともあります.
トランジットシグナルが複数検出されており,かつそのトランジットに TTV が見られる場合は,検出されたシグナルは偽陽性ではないと高い確度で判断でき,またトランジットしている天体の質量を推定することもできます.
TTV 法は、系外衛星を検出するための手段としても有望視されています。
惑星が衛星を持つ場合、惑星と衛星はお互いの重心まわりを公転しながら恒星の回りを公転することになります。
そのため惑星のトランジットのタイミングが、衛星の存在によってわずかにふらつく分だけずれが生じます。
2018 年 5 月の時点では系外惑星の検出報告はありませんが、TTV 法とそのほかの手法と組み合わせることによって、将来的に系外衛星も発見出来ると期待されています。
Transit Timing Variation 法と似たものに、Transit Duration Timing 法 (TDV)があります。
TTV ではトランジットのタイミングのずれを測定する手法でしたが、こちらはトランジット継続時間の変動を測定するものです。
トランジットの光度曲線で言うと、トランジットの幅が変動することになります。
この手法は、新しい惑星の発見というよりも、連星まわりの惑星の確認手法として使用されます。
連星回りの惑星が連星の一方の恒星を隠すとき、その恒星と惑星の運動する方向によってトランジットの継続時間が異なります。
恒星が惑星と反対方向に運動している時は継続時間は短く、同じ方向に運動している時は長くなります。
このトランジット継続時間の変動は、先述の TTV と組み合わせることによってその惑星が周連星惑星 (circumbinary planet) であることの決定的な証拠となります。
TDV が初めて検出されたのは、ケプラー16(AB)b です。
この系は、ケプラー16A とケプラー16B の近接連星の回りを惑星であるケプラー16(AB)b が公転する、周連星惑星になっています (単に "ケプラー16b" とだけ表記する場合もあります)。
この惑星の発見はトランジット法によるものですが、連星の周囲を公転している影響ではっきりとした TTV と TDV が確認されています。
なお、TDV 法単独で惑星が発見されたという例はありませんが、TTV と TDV の両方が明確に検出された上で新しい惑星が同定された初めての例として、KOI-142c があります (ケプラー88c と表記される場合も)。
トランジット惑星である KOI-142b (またはケプラー88b) では、非常に大きなトランジット時刻の変動とトランジット継続時間の変動が確認され、それらを元に KOI-142c の存在が同定されました。
これらが発見されたのは 2013 年です。
KOI-142 系での TTV や TDV が非常に大きい理由は、2 つの惑星が 1:2 の軌道共鳴に入っており、軌道要素の変動が大きくなっているためです。
TDV 法も TTV 法と同様に、系外衛星を検出する手段として有望視されています。
惑星と衛星が両者の重心回りを公転する運動によって、恒星に対する見かけの速度が変動します。
そのため恒星の手前を横切る時間に変化が生じる、すなわちトランジットの継続時間が変動することになります。
こちらも同じく周連星惑星を持つ連星で起きる現象を用いる手法です。
連星の中には、公転運動に伴ってお互いを隠し合う事で光度の変動が発生する、食連星 (eclipsing binary) が存在します。
連星同士の食のタイミングは連星系の質量によって決まりますが、この連星の回りに惑星がある場合は、惑星が恒星の運動に影響を及ぼすことによって食のタイミングが変動することがあります。
このタイミングの変動を検出する手法を、Eclipse Timing Variation法 (ETV) と呼びます。
この他にも、"eclipsing binary minima timing" などと呼ばれることもあります。
メカニズムは TTV と似ています。
ETV 法のメリットは、恒星同士の食による減光は惑星によるトランジットの減光よりも大きいため、検出の精度が高い事にあります。
連星系の質量が小さいほど、また惑星の質量が大きいほど食のタイミングの変動は大きくなるため、ETV 法で検出しやすくなります。
ETV が初めて検出されたのは、TDV と同じくケプラー16(AB)b です。
ETV で発見された惑星には、しし座DP星 (DP Leo) の周りを公転するしし座DP星b などがあります。
この惑星は 2009 年に発見が報告されました (発見報告論文の出版は 2010 年)。
パルサータイミング法では、パルサーから放たれる周期的な電波が惑星の運動によって変動する現象を捉える事で惑星を検出していました。
一方、周期的な変動を起こすのはパルサーだけとは限りません。
中心星が十分に周期的な変動をしている変光星で、なおかつその周囲を惑星が公転している場合、中心星からの周期的なパルスにドップラーシフトが生じます。
中心星が地球に近付いてくる場合はパルスの周期が短く観測され、遠ざかる時は長くなっているように観測されます。
そのため、中心星の分光観測をして視線速度の測定をしなくても、パルスのタイミングの変動から視線速度を測定出来ることになります。
この視線速度の変動から惑星を検出する方法が、Pulsation Timimg Variation です。
その他、"variable star timing" などと呼ばれることもあります。
パルサーの周期は極めて正確で、周期も非常に短いため精度の高い観測が可能ですが、変光星の変動はパルサーほど正確ではなく、一般に周期も長いためパルサータイミング法ほどの精度はありません。
観測の精度は、中心星の変動周期や、惑星の質量・軌道長半径に依存します。
観測から得られるのは視線速度成分の変動であるため、惑星に関して得られる情報は視線速度法の時と同じく、惑星の最小質量と公転周期、軌道離心率になります。
中心星の質量が別の観測から分かっていれば、軌道長半径も計算出来ることになります。
Pulsation Timing Variation を用いて初めて発見された惑星は、ペガスス座V391星b (V391 Pegasi b) で、2007 年に発見されました。
中心星のペガスス座V391星は、準矮星 (subdwarf) と呼ばれる、高温でコンパクトなタイプの天体です。
スペクトル型が B 型の準矮星は、B 型準矮星 (subdwarf B star, sdB star) と呼ばれます。
また、ヘルツシュプルング・ラッセル図 (HR図) の上での分布から、「超水平分枝星 (extreme horizontal branch star)」と呼ばれることもあります。
B 型準矮星は、恒星が赤色巨星に進化した段階で、何らかの原因によって内部でヘリウム燃焼が開始する前に外層の大部分を失ってしまった天体だと考えられています。
準矮星という名前が示す通り、通常の恒星のサイズより一回り以上小さいサイズを持ちます。
B 型準矮星の中には短い周期で変光を起こしているものがあり、ペガスス座V391星もその変光星の仲間です。
ペガスス座V391星b は、かつては中心星からおよそ 1 AU の場所を公転し、中心星のペガスス座V391星は 0.9 太陽質量程度だったと考えられています。
その後恒星は主系列段階から赤色巨星へと進化し、恒星の半径は 0.7 AU にまで膨張したと推測されています。
そのため、その段階では恒星表面から惑星までの距離はわずか 0.3 AU にまで縮まったことになります。
その後恒星は外層の大部分を喪失して 0.5 太陽質量程度の B 型準矮星となり、中心星の質量が減少するのに伴って惑星の軌道長半径もおよそ 1.7 AU にまで広がりました。
そのためペガスス座V391星b は、中心星の赤色巨星段階を生き延びて残った惑星の一例だろうと考えられています。
2014 年 12 月の段階ではペガスス座V391星b が Pulsation Timing Variation で発見された唯一の例となっていましたが、2016 年に KIC 7917485b が新たに Pulsation Timing Variation で発見されました (発見報告論文の出版は 2016 年 8 月)。
中心星の KIC 7917485 は A 型主系列星で、たて座デルタ型変光星 (delta Scuti variable) という種類の変光星です。
この中心星の変光のタイミング変化から、惑星が検出されました。
Orbital Brightness Modulation は、惑星の軌道運動に伴って中心星のみかけの明るさが変動することを利用して、惑星を発見する手法のことです。
惑星の公転によって中心星の見かけの明るさが変動するメカニズムには複数あります。
代表的なものは、
これらによる変動を組み合わせて惑星を検出したり、惑星の物理量を決定したりする方法の事を、relativistic BEaming、Ellipsoidal、Reflection/emission から取って BEERアルゴリズム (BEER algorithm) と呼ぶ事があります。
BEER アルゴリズムは Faigler と Mazeh によって 2011 年に提唱されたアイデアで、その後 2013 年には同じく Faigler らによって、ケプラーの変光データから BEER アルゴリズムを用いてケプラー76b が発見されています。
Faigler は Mazeh の下で研究をしていた大学院生で、師弟関係にあります。
なお、3 番目の惑星の反射光・熱放射の変動を観測することによる惑星の発見は、BEER アルゴリズムによる発見に先立つ 2011 年に初めて報告されています (KOI-55b、KOI-55c の 2 つ、後述)。
相対論的ビーミング (relativistic beaming) は、相対論的な効果によって中心星の明るさが変動して見える現象です。"Doppler beaming" や "Dopper boosting" と呼ばれることもあります。
惑星が中心星の周囲を公転することによって、中心星もわずかに振り回されることになります。
この時、恒星が進む方向には相対論的な効果によって恒星からの光が集約されます。
電磁波の放射源が相対論的な速度で運動している時は進行方向への放射の集約が非常に顕著になり、本来はこの効果を「相対論的ビーミング」と呼びます。
恒星の運動は相対論的な速度とは言えませんが (光速に比べて遥かに遅い)、それでもわずかにこの効果によって光の集約が発生し、明るさが変動して見えることになります。
上の図は相対論的ビーミングの模式図です。
左下方向に観測者がいると考えてください。
相対論的ビーミングによる光度変化は、図中の (1) で表される、恒星が観測者に向かって近付いてくるとき (すなわち惑星が遠ざかっているとき) に最大となり、(3) の恒星が遠ざかっているとき (惑星が近付いているとき) に最小となります。
そのため、相対論的ビーミングによる中心星の光度の変動周期は、惑星の公転周期と等しくなります。
相対論的ビーミングによる中心星の光度変化が検出された初めての例は TrES-2 で、2011 年の事です。
TrES-2 は既にトランジット法によって発見されていた惑星ですが、ケプラーを用いた TrES-2 の主星の光度変化の観測から、相対論的ビーミングによる光度の変動が起きている事が明らかになりました。
なおこの時に観測されたのは相対論的ビーミングのみの変動ではなく、相対論的ビーミングと、潮汐力による恒星の変形による変動、惑星の反射光の変動の合計による変光です。
光度曲線の形状から、これら 3 つの効果が合わさった変動を見ていることが判明しています。
そのため、TrES-2 の主星での光度変化の検出は、BEER アルゴリズムの初めての検出例とも言えます。
潮汐力は、天体の各場所にはたらく引力の違いに起因する力です。
最も身近な例は月の潮汐力で、地球は月の潮汐力によって、月に面した方向とその反対側に引き延ばされるような力を受けています。
この潮汐力によって、潮の満ち干が発生しています (正確には月の潮汐力と太陽の潮汐力の合計)。
太陽と地球の場合は、地球が軽いことと距離が離れていることから、地球が太陽に及ぼす潮汐力はほとんど無視出来ます (潮汐力は距離の 3 乗に反比例)。
しかし、ホットジュピターなど中心星に非常に近い巨大ガス惑星の場合は、惑星が中心星に与える潮汐力の効果も無視出来なくなります。
惑星の潮汐力によって、中心星は惑星の方向とその反対方向に引き延ばされて楕円体 (ellipsoid) になります。
これはラグビーボールのような形状と表現されることもあります。
恒星が楕円体状になっている場合、どの方向から恒星を見ているかによって恒星の見かけの面積が異なります。
おおまかには、見えている表面積が大きい方が明るく、小さい方が暗く見えることになります。
これが、潮汐力に伴う恒星の変形による光度変化で、ellipsoidal variation と呼ばれます。
惑星によるものに限らず、恒星が伴星の潮汐力によって楕円体状に変形し、見た目の面積が変動するために変光して見える変光星を、楕円体状変光星 (ellipsoidal variable star) と呼びます。
そのため、これは惑星の潮汐力による楕円体状変光星の変動を観測していることになります。
上の図は、惑星の潮汐力による恒星の変形と、それに伴う恒星の見かけの明るさの変化を模式的に示した図です。
下の段に示したのが恒星の見かけの大きさの変化です。
(1) の状態の時は楕円体を横から見ていることになるため、光度は最大になります。
惑星が反対側にいる (3) の時も同様です。
一方、(2) と (4) の時は楕円体の長軸方向から恒星を見ていることになるため、見かけの表面積が最小となり、光度も最小となります。
惑星が 1 回公転する間に光度の変動は 2 回起きることになるため、潮汐力に伴う恒星の変形による光度変化の周期は、惑星の公転周期の半分になります。
この ellipsoidal variation は、2010 年に HAT-P-7 で初めて確認されました。
HAT-P-7b は既にトランジット法によって 2008 年に発見されていた惑星ですが、その中心星 HAT-P-7 のケプラーによる観測データから、ellipsoidal variation を起こしていることが確認されました。
惑星は中心星より遥かに暗いため、惑星表面での反射光、惑星からの熱放射 (主に赤外線) を中心星から分離して直接観測するのは極めて困難です。
ごく一部の限られた場合のみ、直接撮像が可能となります。
しかし、惑星の反射光・熱放射を中心星からの放射と分離せずに一緒に観測することは可能です。
この場合、惑星が軌道上のどの位置にいるかによって惑星の満ち欠けの相が異なるため、地球にやってくる惑星表面での反射光も相に応じて変動することになります。
ちょうど月の満ち欠けや、金星の満ち欠けの変動を見ているのと同じです。
また惑星自身の熱放射も、中心星に照らされている昼側とそうでない夜側では強度が異なることが予想されるため、こちらも相によって変動することが期待されます。
これらの惑星からの反射光・熱放射が惑星の公転に伴って変動するため、合計の放射量が変動して観測される現象が、reflection/emission modulation です。
上の図は、惑星の満ち欠けを模式的に示したものです。
下の段に示したのが、地球から見た場合の惑星の "満ち欠け" の変化です。
(1) の位置関係の場合、惑星は "半月" 状に見えることになります。
(2) のように惑星が恒星の反対側にいる場合は、惑星は "満月" になっているため、中心星と惑星での反射光・熱放射の合計の光度は最も大きくなることになります。
この時に惑星が恒星の背後に隠れると、secondary eclipse (二次食) として観測されることになります。
(3) は (1) と同様に "半月" 状です。
(4) のように惑星が恒星の手前側にいる場合は、惑星は "新月" になっているため、ほぼ中心星からの放射のみを見ていることになります。
この時に惑星が恒星の手前を通過すると、トランジットとして観測されます。
ここから分かるように、惑星の反射光/熱放射の変動による周期は、惑星の公転周期と等しくなります。
また、相対論的ビーミングによる光度変化とは、1/4 周期だけ位相がずれています。
Reflection/emission modulation は、2009 年に CoRoT-1 で初めて確認されました。
CoRoT-1b は宇宙望遠鏡のコロー (COROT) によるトランジット観測で 2007 年に既に発見されていた惑星で、その後の COROT による変光の観測から、惑星の軌道上での位置の変化に伴う光度の変動が確認されました。
CoRoT-1b はトランジットと secondary eclipse が両方起きている惑星なので、図 (1) の状態では徐々に増光し、(2) で光度が最大になる前後でsecondary eclipse が発生し、その後 (3) の状態では徐々に減光し、光度が最小になる所でトランジットが発生する、というサイクルが観測されています。
Reflection/emission modulation による惑星の初発見例は、2011 年の KOI-55b と KOI-55c の 2 つです。
ケプラー70b, ケプラー70c として紹介されている場合もあります。
中心星の KOI-55 (あるいはケプラー70) は、Pulsation Timing Variation の例でも出て来た、B 型準矮星です。
軌道長半径は、KOI-55b がわずか 0.0060 AU、KOI-55c も 0.0076 AU であり、ホットジュピターの典型的な軌道長半径の 10 分の 1 にも満たない極めて近距離を公転しています。
恒星の進化を考えると、中心星の KOI-55 はかつて赤色巨星に進化し、その後外層を失って B 型準矮星に進化したはずです。
そのため、KOI-55b, c の 2 つはかつてはより遠方を公転する巨大ガス惑星であり、KOI-55 が赤色巨星に進化した段階でその外層に飲み込まれたと考えられています。
しかし、外層に飲まれて中心へ向かって落下していったものの完全な消滅は免れ、KOI-55 が外層を失って B 型準矮星になった後に、巨大ガス惑星の残骸が残ったものではないかと推定されています。
概要でも触れたように、Orbital Brightness Modulation の主要な 3 つの効果を組み合わせて惑星を検出する手法を、BEER アルゴリズムと呼ぶことがあります。
上で紹介した 3 つの効果はどれも惑星の軌道運動に伴う光度の変動ですが、それぞれ光度変動の位相や周期、振幅が異なります。
そのため、3 つの効果を合計した場合の光度曲線は複雑な形状になります。
上に示したのが、Orbital Brightness Modulation で考えている 3 つの光度変化と、その合計の概略図です。
横軸は経過時間で惑星の 1 周期分を表示していて、縦軸は 0 を基準の光度とした場合の光度変化です。
赤い太線が、3 つの効果を合計したものです。
図ではイラストの (1) の状態の時が、合計の光度が最も大きくなっています。
周期や位相が異なる波の合成になるため、複雑な光度曲線になっていることが分かります。
初めて Orbital Brightness Modulation による光度変化が確認された TrES-2 の主星では、上に示した光度曲線とほとんど同じ変動をしています。
しかし光度曲線の詳細な形状は、それぞれの要素による光度変動の振幅によって変化します。
ここでは、ここまで紹介したものの他に系外惑星の検出・発見方法として可能性があるものを簡単に紹介します。
まずは偏光分析法 (polarimetry) があります。
恒星から放たれる光は偏光を起こしていない状態、つまり電磁波の振動方向がランダムな方向を向いています。
しかし惑星の大気で反射したり、大気を通過したりした光は大気中の分子によって偏光する、つまり電磁波の振動方向に偏りが生じます。
そのため、恒星と惑星と地球の位置関係によって、惑星大気による偏光の度合いが周期的に変化します。
惑星大気による偏光度は極めて小さいため検出は難しいですが、2008 年にはトランジット惑星である HD 189733b の大気による偏光度の変動を観測する事に成功しています。
これが惑星による偏光度の変化を検出出来た初めての例です。
2018 年 5 月現在、偏光分析法を用いて発見された惑星はありません。
また、惑星からの電波を検出することによって惑星を発見したり、惑星の物理量を決定する事が出来ると期待されています。
惑星磁気圏からの電波放射 (magnetospheric radio emission) は、現在の技術では観測限界を遥かに下回るため観測が困難ですが、将来的には可能になることが期待されています。
惑星磁気圏から放射される電波は惑星の自転周期に伴う変動をするため、この電波を観測する事が出来れば測定が難しい系外惑星の自転周期を測定出来る可能性があります。
巨大ガス惑星からのオーロラ電波放射 (auroral radio emission) も、将来的には観測可能であると考えられています。
系外を直接捉えるものとしては、惑星がトランジットしている最中の状態を、可視光や赤外線の干渉計で撮像するトランジット撮像 (transit imaging) というものがあります。
これは系外惑星の日面通過 (恒星面通過) を干渉計で直接分解して、惑星の "影" を撮像するという構想です。
惑星がトランジットしている時の影を直接撮像することによって、惑星本体の角半径が測定でき、また年周視差によってその系までの距離が分かれば惑星の物理的な大きさを計算することが出来ます。
通常のトランジットでは、惑星の半径の算出には中心星の半径の不定性が入ってしまいますが、トランジット撮像の場合は直接惑星の半径を測定できるため、原理的にはトランジット法よりも確実に惑星の半径を測定できることになります。
Transit Timing Variation 法による発見
Transit Timing Variation 法で分かる事
その他
Transit Duration Variation 法 (TDV)
Transit Duration Variation 法の概要
Transit Duration Variation の検出
その他
Eclipse Timing Variation 法 (ETV)
Eclipse Timing Variation 法の概要
Pulsation Timing Variation
Pulsation Timing Variation の概要
Pulsation Timing Variation による発見
Orbital Brightness Modulation
Orbital Brightness Modulation の概要
の 3 種類です。
相対論的ビーミング
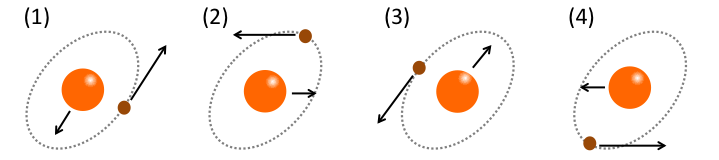
潮汐力による変形の効果
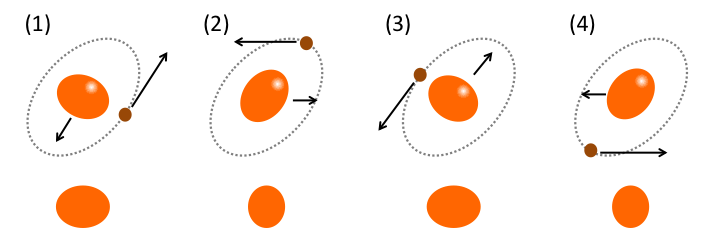
惑星の反射光/熱放射の変動
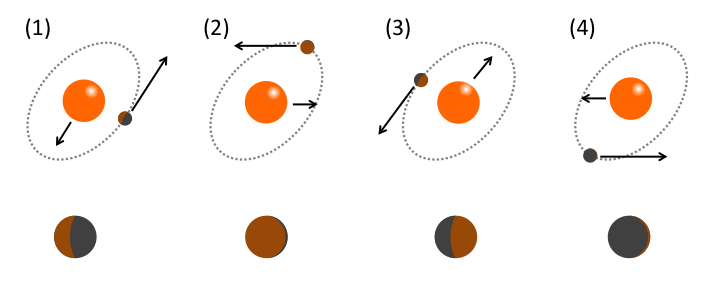
Orbital Brightness Modulation での光度変化
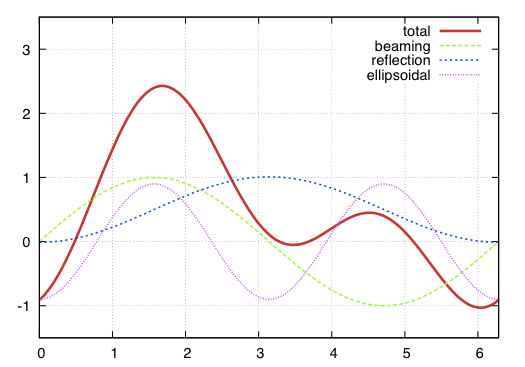
緑の点線で示したのが、相対論的ビーミングによる光度変化です。
最大の部分がこれまでのイラストの (1) の状態、最小の部分が (3) の状態です。
紫の点線は ellipsoidal variation による変動です。
1 回目の極大は (1) の状態で、相対論的ビーミングの極大と同じタイミングですが、2 回目の極大は (3) の状態で、この時は相対論的ビーミングは極小になっています。
青の点線は reflection/emission modulation による変動です。
極小になっているのは (4) の状態で、(2) の状態が極大になっています。
トランジットを起こす惑星の場合は、光度曲線の極大の所で secondary eclipse、極小の所でトランジットによる減光がそれぞれ発生しますが、ここではトランジットはしないものとして描いています。
その他
参考文献・サイト
NASA Exoplanet Archive
Exoplanet Orbit Database
観測成果 - レーザーガイド補償光学のファーストライト成功 ~すばる望遠鏡の視力を10倍にするレーザーガイド補償光学!~ - すばる望遠鏡
AstroArts - 「重いほど自転が速い」傾向、系外惑星にも
TMTの現地建設開始を決定 | 国立天文台TMT推進室
観測成果 - すばる望遠鏡、太陽系外惑星の公転軸傾斜角の測定に成功 - すばる望遠鏡
観測成果 - すばる望遠鏡、主星の自転に逆行する太陽系外惑星を発見 - すばる望遠鏡
観測成果 - すばる望遠鏡、大きく傾いた軌道を持つ惑星系を次々に発見 - すばる望遠鏡
浮遊惑星という新たな系外惑星が多く存在していることを発見|太陽地球環境研究所 - Solar-Terrestrial Environment Laboratory,名古屋大学
AstroArts - 惑星の多くは一人ぼっち?主星を持たない系外惑星を発見
AstroArts - 太陽系外の浮遊惑星を回る「系外衛星」候補を観測
Chauvin et al. (2004) "A giant planet candidate near a young brown dwarf", A&A
Song et al. (2006) "HST NICMOS Imaging of the Planetary-mass Companion to the Young Brown Dwarf 2MASS J1207334-393254", ApJ
Lafreniter et al. (2008) "Direct Imaging and Spectroscopy of a Planetary Mass Candidate Companion to a Young Solar Analog", ApJL
Champbell et al. (1988), "A search for substellar companions to solar-type stars", ApJ
Hatzes et al. (2003), "A Planetary Companion to γ Cephei A", ApJ
Latham et al. (1989) "The unseen companion of HD114762: a probable brown dwarf", Nature
Mayor & Queloz (1995) "A Jupiter-mass companion to a solar-type star", Nature
Gray (1997), "Absence of a planetary signature in the spectra of 51 Pegasi", Nature
Gray (1998), "A planetary companion for 51 Pegasi implied by absence of pulsations in the stellar spectra", Nature
Anglara-escude (2010), "Aliases of the first eccentric harmonic : Is GJ 581g a genuine planet candidate?", ApJL
Robertson et al. (2014), "Stellar activity masquerading as planets in the habitable zone of the M dwarf Gliese 581", Science
Jacob (1885), "On certain Anomalies presented by the Binary Star 70 Ophiuchi", MNRAS
See (1896), "Researches on the orbit of 70 Ophiuchi, and on a periodic perturbation in the motion of the system arising from the action of an unseen body", AJ
Moulton (1899), "The limits of temporary stability of satellite motion, with an application to the question of the existence of an unseen body in the binary system F.70 Ophiuchi", AJ
Doolittle (1897), "The orbit of F.70 Ophiuchi", AJ
Sherrill (1999), "A Career of Controversy: The Anomaly of T. J. J. See", Journal for the History of Astronomy
Reuyl & Holmberg (1943), "On the Existence of a Third Component in the System 70 Ophiuchi", ApJ
van de Kamp (1963), "Astrometric study of Barnard's star from plates taken with the 24-inch Sproul refractor", AJ
van de Kamp & Lippincott (1951), "Astrometric study of Lalande 21185", AJ
Gatewood (1974), "An astrometric study of Lalande 21185", AJ
Gatewood (1996), "Lalande 21185", American Astronomical Society, 188th AAS Meeting
Struve (1952), "Proposal for a project of high-precision stellar radial velocity work", Observatory
Charbonneau et al. (2000), "Detection of planetary transits across a sun-like star", ApJ
Henry et al. (2000), "A transiting "51 Peg-like" planet", ApJ
Mazeh et al. (2000), "The spectroscopic orbit of the planetary companion transiting HD 209458", ApJ
Udalski et al. (2002), "The optical gravitational lensing experiment. Search for planetary and low-luminosity object transits in the Galactic disk. Results of the 2001 campaign - Supplement.", Acta Astoronomica
Kipping & Spiegel (2011), "Detection of visible light from the darkest world", MNRAS
Vanderburg et al. (2014), "Characterizing K2 Planet Discoveries: A super-Earth transiting the bright K-dwarf HIP 116454", ApJ
Rossiter (1924), "On the detection of an effect of rotation during eclipse in the velocity of the brigher component of beta Lyrae, and on the constancy of velocity of this system", ApJ
McLaughlin (1924), "Some results of a spectrographic study of the Algol system", ApJ
Paczyński (1986), "Gravitational microlensing by the galactic halo", ApJ
Bond et al. (2004), "OGLE 2003-BLG-235/MOA 2003-BLG-53: A Planetary Microlensing Event", ApJ
Bennett et al. (2014), "A Sub-Earth-Mass Moon Orbiting a Gas Giant Primary or a High Velocity Planetary System in the Galactic Bulge", ApJ
Richards et al. (1969), "Quasi-Sinusoidal Oscillation in Arrival Times of Pulses from NP 0532", ApJ
Michel (1970), "Pulsar Planetary Systems", ApJ
Rees & Trimble (1971), "Physical Sciences: Planet, Pulsar, ``Glitch'' and Wisp", Nature
Bailes et al. (1991), "A planet orbiting the neutron star PSR1829–10", Nature
Lyne & Bailes (1992), "No planet orbiting PS R1829–10", Nature
Wolszczan & Frail (1992), "A planetary system around the millisecond pulsar PSR1257 + 12", Nature
Wolszczan (1994), "Confirmation of Earth-Mass Planets Orbiting the Millisecond Pulsar PSR B1257 + 12", Science
Konacki & Wolszczan (2003), "Masses and Orbital Inclinations of Planets in the PSR B1257+12 System", ApJ
Ballard et al. (2011), "The Kepler-19 System: A Transiting 2.2 R ⊕ Planet and a Second Planet Detected via Transit Timing Variations", ApJ
Agol et al. (2005), "On detecting terrestrial planets with timing of giant planet transits", MNRAS
Holman & Murray (2005), "The Use of Transit Timing to Detect Terrestrial-Mass Extrasolar Planets", Nature
Holman et al. (2010), "Kepler-9: A System of Multiple Planets Transiting a Sun-Like Star, Confirmed by Timing Variations", Nature
Welsh et al. (2013), "Recent Kepler Results On Circumbinary Planets", Proceedings IAU Symposium
Nesvorný et al. (2013), "KOI-142, The King of Transit Variations, is a Pair of Planets near the 2:1 Resonance", ApJ
Silvotti et al. (2007), "A giant planet orbiting the `extreme horizontal branch' star V391 Pegasi", Nature
Faigler et al. (2013), "BEER Analysis of Kepler and CoRoT Light Curves. I. Discovery of Kepler-76b: A Hot Jupiter with Evidence for Superrotation", ApJ
Faigler & Mazeh (2011), "Photometric detection of non-transiting short-period low-mass companions through the beaming, ellipsoidal and reflection effects in Kepler and CoRoT light curves", MNRAS
Barclay et al. (2011), "Photometrically derived masses and radii of the planet and star in the TrES-2 system", ApJ
Welsh et al. (2010), "The Discovery of Ellipsoidal Variations in the Kepler Light Curve of HAT-P-7", ApJ
Snellen et al. (2009), "The changing phases of extrasolar planet CoRoT-1b", Nature
Charpinet et al. (2011), "A compact system of small planets around a former red-giant star", Nature
Berdyugina et al. (2008), "First detection of polarized scattered light from an exoplanetary atmosphere", ApJL
Nichols (2011), "Magnetosphere-ionosphere coupling at Jupiter-like exoplanets with internal plasma sources: implications for detectability of auroral radio emissions", MNRAS
Rajpaul et al. (2015), "Ghost in the time series: no planet for Alpha Cen B", MNRAS
Qian et al. (2010), "Detection of a Giant Extrasolar Planet Orbiting the Eclipsing Polar DP Leo", ApJL
van Belle et al. (2014), "Direct Imaging of Planet Transit Events", Proceedings of the International Astronomical Union
Mróz et al. (2017), "No large population of unbound or wide-orbit Jupiter-mass planets", Nature
2014年12月12日
2017年06月05日 更新